

Računalniško vidjenje pri prepoznavanju registrskih tablic
V dobi hitrega tehnološkega napredka je računalniško vidjenje postalo osnova inteligentnih sistemov, ki s tem, ko omogočajo strojem »videti« in razumeti vizualne podatke, preobrazujejo industrije. Med njegovimi aplikacijami je prepoznavanje registrskih tablic (LPR) ena najbolj praktičnih, saj zajemanje registrskih tablic spremeni v orodje, ki poenostavi upravljanje prometa, izboljša varnost in spodbuja razvoj pametnih mest.
1. Načelo računalniškega vidjenja pri prepoznavanju registrskih tablic
Pridobivanje slik
Kot osnova za LPR zajemanje slik uporablja visokoločkaste kamere (2–8 megapikselov) in specializirane senzorje, nameščene na ključnih lokacijah (križišča, vhodi v parkirišča). Te naprave so kalibrirane za čas zaklopa, odprtino in ISO, da zajamejo jasne slike vozil, pri čemer morajo biti registrske tablice razločne za nadaljnjo obdelavo.

Predobdelava slike
Surove slike vozil pogosto vsebujejo šum, neenakomerno svetlost in nizek kontrast. Predobdelava to popravi s pretvorbo v sivine (poenostavitev podatkov ob ohranjanju strukture tablice), zmanjševanjem šuma (Gaussov/medianski filter) in izboljševanjem kontrasta (uravnoteženje histograma), kar poudari podrobnosti tablice za njeno lokalizacijo.
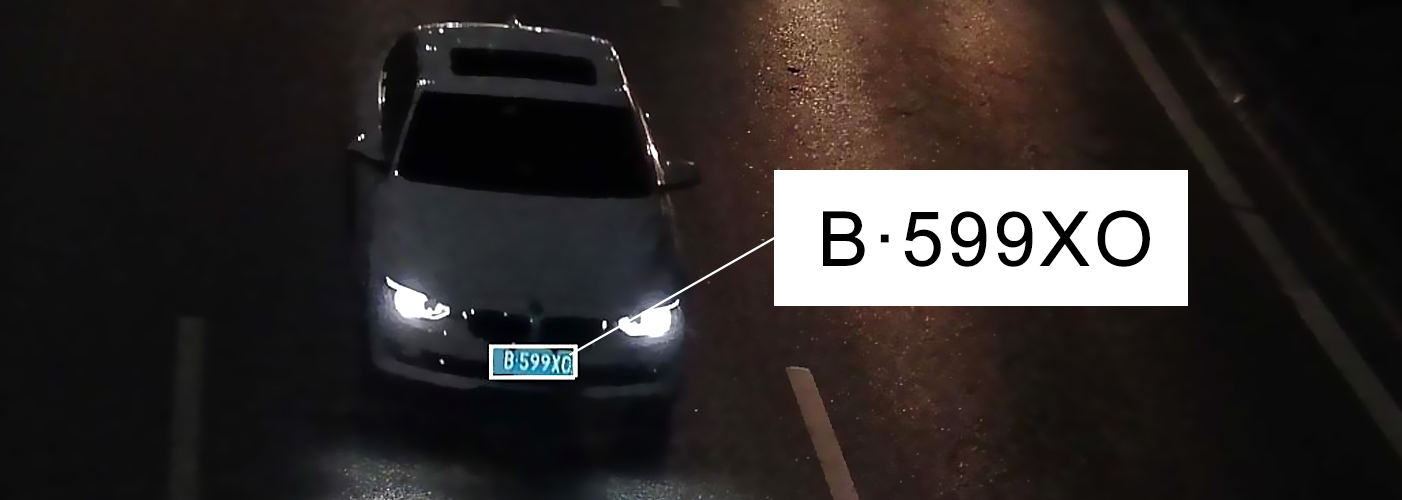
Lokacija registrske tablice
Ta korak izolira registrsko tablico na slikah vozil s pomočjo njenih edinstvenih lastnosti: oblike (standardni pravokotnik s fiksnim razmerjem stranic), barve (npr. modro-bela za civilna vozila v Kitajski) in teksture. Zaznavanje robov (Canny) in segmentacija barv delujeta skupaj, da izrežeta področje tablice iz nepomembnih elementov.
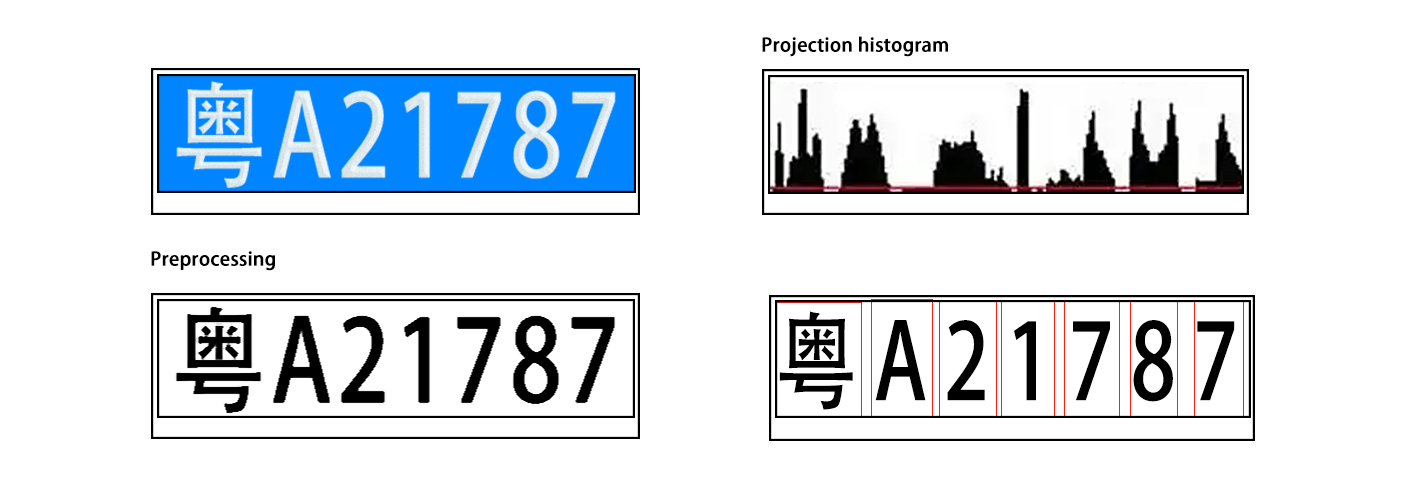
Segmentacija znakov
Za pripravo na prepoznavanje segmentacija znakov razdeli znake registrske tablice na posamezne slike. Uporablja horizontalno projekcijo (vertikalno območje znaka) in vertikalno projekcijo (za zaznavanje vrzeli med znaki). Za nagnjene tablice se uporabi popravek naklona, da se zagotovi natančno ločevanje posameznih znakov.
Prepoznavanje znakov
Osnovni korak uporablja optično prepoznavanje znakov (OCR, primerjava na podlagi predloge) ali globoko učenje (konvolucijske nevronske mreže – CNN, samoučenje iz podatkovnih naborov). Vsak segmentiran znak se obdela, izvede kot besedilo in združi v celoten številčni niz registrske tablice.
2. Uporaba računalniškega vida pri prepoznavanju registrskih tablic
Upravljanje prometa
Sistemi LPR na križiščih in avtocestah nadzirajo vozila, prepoznavajo tablice in jih ujamejo s podatki o prekrških. Zajamejo številke tablic, beležijo čas in lokacijo prekrška ter pošiljajo podatke na upravne platforme, s čimer zmanjšujejo ročno delo in izboljšujejo varnost na cestah.
Upravljanje parkirišči
LPR avtomatizira parkirišča: kamere zajamejo tablice na vstopih (beležijo čas vstopa, odpirajo zapore) in na izhodih (izračunajo trajanje, ustvarijo provizije za brezgotovinsko plačilo). S tem se skrajšajo čakanja in odpravijo težave, povezane s parkirnimi listki.
Zbiranje taksn
Na avtocestah in v predorih LPR omogoča zbiranje taksn brez ustavljanja. Prepozna tablice, preveri registracijo, samodejno odšteje takse za registrirana vozila (kar zmanjša čas transakcije na <1 sekundo) in generira račune za neregistrirana vozila, s čimer olajša zastoj.

Varnost in nadzor
Integriran v kamere javnih prostorov, LPR skenira tablice in jih ujema s seznamom opozoril (ukradena vozila, sumljiva vozila). Osebju za varnost sporoči opozorilo ob ujemanju, kar omogoča hitro reakcijo in izboljša varnost v javnosti.
3. Prednosti strojnega vida pri prepoznavanju registrskih tablic
Visoka učinkovitost
Strojni vid obdela stotine slik na minuto, pri čemer traja prepoznavanje 0,1–0,5 sekunde na vozilo. Za razliko od ročnega delovanja ohranja enakomerno zmogljivost, zmanjšuje stroške in izboljšuje storitve.
Visoka natančnost
Napredni algoritmi in umetna inteligenca omogočajo več kot 99 % natančnost v idealnih pogojih in >95 % v zahtevnih okoljih – kar je znatno višje kot pri ročnem prepoznavanju (napačna prepoznavanja pri več kot 5 %). To zagotavlja zanesljivost pri zbiranju taksnih dajatev in varnosti.
24/7 obratovanje
Opremljen z senzorji za slabo osvetlitev in kamerami, odpornimi na vreme, sistem LPR deluje neprekinjeno. Infrardeče/LED osvetlitev pomaga pri zajemanju podatkov ponoči, izboljševalni algoritmi pa zmanjšujejo vpliv vremenskih pogojev, kar zagotavlja neprekinjeno delovanje.
Upravljanje in analiza podatkov
Rezultati prepoznavanja (številka tablice, čas, lokacija, slike) se shranjujejo v centralizirano bazo podatkov za hitro iskanje. Podatki se analizirajo za prepoznavanje trendov – optimizacijo semaforjev, prilagoditev cen parkiranja ali sledenje sumljivim vozilom.
4. Izzivi in rešitve pri prepoznavanju registrskih tablic na podlagi strojnega vida
Zahtevna okolja
Ekstremno vreme (dež, megla, bleščanje), spremembe osvetlitve in obrabljene tablice zmanjšajo natančnost do <80 % v hudih primerih, kar vpliva na zanesljivost.

Kompleksne vozne scene
Prekrivanje (zasenčene tablice), naklon/izkrivljanje in scenariji z več tablicami motijo prepoznavanje, saj si tradicionalni algoritmi ne znajo pomagati pri nestandardnih vhodih.
Rešitve in izboljšave
Optimizacija strojne opreme (kamere z HDR, infrardeče osvetlitev) in izboljšave algoritmov (prilagodljivo zmanjševanje šuma, odstranjevanje meglice) rešujejo težave v okolju. Korekcija naklona, ravnanje s prekrivanjem in globoko učenje (CNN-ji, temelječi na regijah) omogočajo obdelavo kompleksnih prizorov. Redna vzdrževalna dela in posodobitve zagotavljajo natančnost sistemov.
5. Prihodnji trendi strojnega vida pri prepoznavanju registrskih tablic
Integracija globokega učenja in umetne inteligence
Napredni modeli (transformatorji, učenje z malo primeri) obravnavajo težke primere (izrabljene tablice). Sistemi LPR od konca do konca (ena nevronska mreža za vse korake) poenostavijo načrtovanje, umetna inteligenca pa napoveduje obnašanje vozil za proaktivno upravljanje.
Fuzija več senzorjev
LPR bo integriral LiDAR (3D podatki o vozilu), radar (hitrost/razdalja) in toplotne kamere (temne/puščene pogoje). Fuzija podatkov zmanjšuje napake in naredi sisteme bolj robustne za uporabo v terenu in v izrednih razmerah.
Storitve v oblaku
LPR v oblaku ponuja skalabilnost (dodajanje kamer brez nadgradnje strojne opreme), oddaljeno upravljanje in integracijo med sistemi (deljenje podatkov s platformami pametnih mest). Shranjevanje v oblaku podpira dolgoročno analizo za aplikacije velikega obsega.
6. Zaključek
Strojno vidjenje je temelj sodobnih sistemov za prepoznavanje registrskih tablic, ki s hitrostjo, natančnostjo in obratovanjem 24/7 odpravlja pomanjkljivosti ročnih sistemov. Napredki v področju globokih nevronskih mrež, združevanja podatkov iz več senzorjev in oblak tehnologije omogočajo premagovanje izzivov. Ko bodo pametna mesta rasla, bodo sistemi za prepoznavanje registrskih tablic igrali ključno vlogo pri povezovanju vozil, infrastrukture in uporabnikov ter oblikovanju inteligentnega prometa.





