

การประยุกต์ใช้ระบบปัญญาประดิษฐ์เพื่อการตรวจสอบภาพในการตรวจจับผลไม้เน่า
ในห่วงโซ่อุปทานผลไม้ระดับโลก การสูญเสียหลังการเก็บเกี่ยวอันเนื่องมาจากการเน่าเป็นปัญหาสำคัญ โดยข้อมูลทางสถิติระบุว่ามีผลไม้สดถึง 25% ที่ถูกทิ้งทุกปีเนื่องจากไม่สามารถตรวจพบความเน่าเสียระหว่างกระบวนการคัดแยกและจัดเก็บได้ วิธีการตรวจจับผลไม้เน่าแบบดั้งเดิมซึ่งพึ่งพาการตรวจสอบด้วยมนุษย์นั้นไม่เพียงแต่ต้องใช้แรงงานมากและใช้เวลานาน แต่ยังมีแนวโน้มเกิดข้อผิดพลาดจากมนุษย์—โดยเฉพาะเมื่อจัดการกับผลผลิตปริมาณมาก หรือการเน่าในระยะเริ่มต้นที่มองเห็นได้ยากด้วยตาเปล่า เพื่อแก้ไขข้อจำกัดเหล่านี้ machine vision systems (MVS) ได้กลายเป็นเทคโนโลยีที่เปลี่ยนแปลงวงการ โดยใช้ประโยชน์จากภาพขั้นสูง การประมวลผลภาพด้วยคอมพิวเตอร์ และอัลกอริธึมการเรียนรู้ของเครื่อง เพื่อให้สามารถตรวจจับความเน่าเสียได้อย่างรวดเร็ว มีความแม่นยำ และไม่ทำลายผลิตภัณฑ์
1. หลักการทางเทคนิคของระบบตรวจจับด้วยภาพถ่าย
เป้าหมายหลักของโครงการนี้คือการพัฒนาระบบที่สามารถถ่ายภาพข้อมูลพื้นผิวของผลไม้โดยอัตโนมัติ วิเคราะห์ลักษณะภาพที่เกี่ยวข้องกับความเน่าเสีย และจัดประเภทผลไม้ว่า "ดี" หรือ "เน่าเสีย" ด้วยความแม่นยำสูง โครงสร้างของระบบประกอบด้วยสามส่วนสำคัญ ได้แก่ ฮาร์ดแวร์การถ่ายภาพ , โมดูลปรับสภาพภาพเบื้องต้น , และ อัลกอริธึมการจำแนกประเภทความเน่า .
1.1 การติดตั้งฮาร์ดแวร์การถ่ายภาพ
เพื่อให้มั่นใจในการเก็บข้อมูลอย่างครอบคลุม โครงการนี้ใช้แพลตฟอร์มการถ่ายภาพแบบหลายเซนเซอร์ ซึ่งรวมถึง
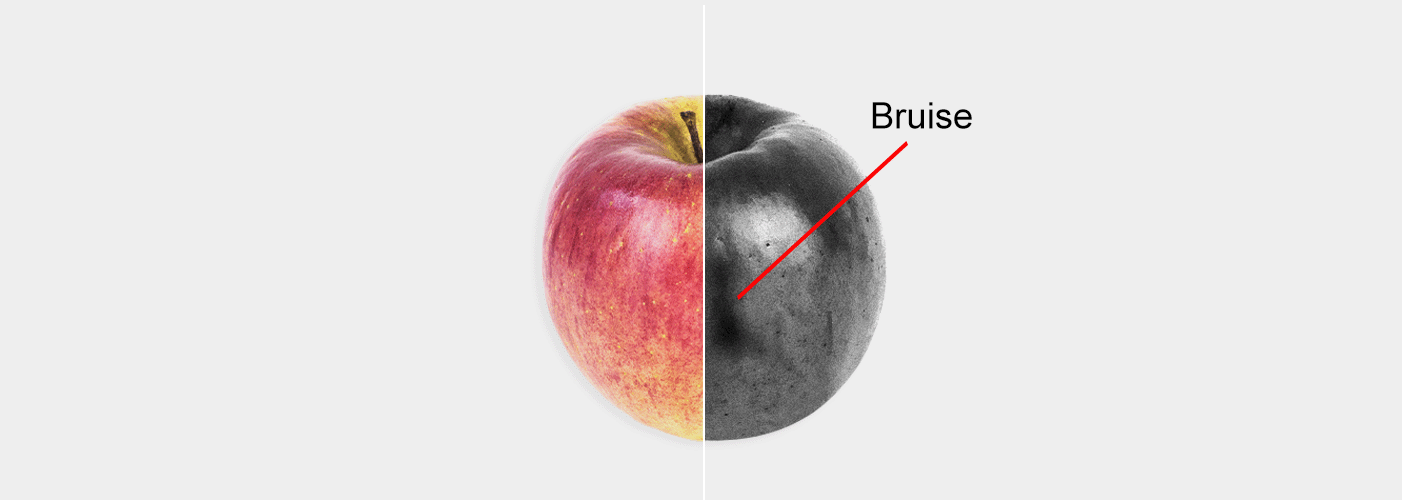
กล้อง RGB ความละเอียดสูง : สำหรับจับข้อมูลสี เนื่องจากความเน่ามักแสดงออกในรูปของการเปลี่ยนสี (เช่น จุดสีน้ำตาลบนแอปเปิ้ล หรือราสีเทาบนสตรอว์เบอร์รี)

กล้องอินฟราเรดใกล้ชิด (NIR) : ตรวจจับการเน่าเสียภายในที่อาจไม่ปรากฏให้เห็นบนผิวสัมผัส เช่น การเน่าจากแกนกลางในลูกแพร์ หรือการเน่าจากจ้ำเลือดในลูกพีช ซึ่งจะเปลี่ยนแปลงการสะท้อนแสงของผลไม้ในช่วง NIR
ระบบไฟส่องสว่างควบคุมได้ : แผงไฟ LED ที่สามารถปรับความเข้มและช่วงคลื่นได้ เพื่อลดเงา แสงสะท้อน และการรบกวนจากแสงสภาพแวดล้อม ทำให้มั่นใจได้ถึงคุณภาพภาพที่สม่ำเสมอในผลไม้หลากหลายชนิด (เช่น เชอร์รี่ผิวมัน เทียบกับอะโวคาโดผิวด้าน)
1.2 การประมวลผลภาพเบื้องต้น: การเพิ่มความชัดเจนของลักษณะเฉพาะ
ภาพดิบมักมีสัญญาณรบกวน (เช่น ฝุ่นบนผิวผลไม้ ความไม่สม่ำเสมอของแสง) ที่อาจบดบังลักษณะเฉพาะที่เกี่ยวข้องกับการเน่า กระบวนการเตรียมภาพของโครงการนี้ประกอบด้วยสามขั้นตอนสำคัญ:
การลดความรุนแรง : การใช้ตัวกรองแบบเกาส์เซียนเพื่อลดสัญญาณรบกวนความถี่สูง ขณะเดียวกันก็รักษาความละเอียดของขอบเขตบริเวณที่อาจเกิดการเน่า
การแปลงพื้นที่สี : การแปลงภาพ RGB ไปเป็นพื้นที่สี HSV (Hue-Saturation-Value) เนื่องจากช่องสี Hue และ Saturation มีความไวต่อการเปลี่ยนแปลงของสีที่เกิดจากเน่าเสียมากกว่าช่องสี RGB มาตรฐาน สำหรับภาพ NIR ให้แปลงเป็นระดับสีเทาและใช้การปรับสมดุลฮิสโตแกรมเพื่อเพิ่มความคมชัดระหว่างเนื้อเยื่อที่แข็งแรงและเนื้อเยื่อที่เน่าเสีย
การแบ่งส่วน : การใช้อัลกอริธึมการแบ่งระดับความเข้มข้นและการตรวจจับขอบ (เช่น Canny edge detector) เพื่อแยกผลไม้ออกจากพื้นหลังและแบ่งส่วนบริเวณที่อาจเน่าเสียได้ ตัวอย่างเช่น การตั้งค่า threshold บนช่อง Hue สามารถระบุจุดเน่าสีน้ำตาลบนแอปเปิ้ลสีเขียวได้ โดยการแยกแยะออกจากสีเขียวปกติของผลไม้
2. ลำดับการทำงานของโครงการ: จากการป้อนผลไม้ไปจนถึงผลลัพธ์การคัดแยก
ระบบตรวจจับด้วยเครื่องจักรวิสัยทัศน์ทำงานเป็นส่วนหนึ่งของสายการบรรจุผลไม้อย่างบูรณาการ โดยดำเนินตามลำดับขั้นตอนอย่างราบรื่น:
การป้อนผลไม้ : ผลไม้จะถูกโหลดลงบนสายพานลำเลียง ซึ่งจะเคลื่อนย้ายผลไม้ไปยังสถานีถ่ายภาพด้วยความเร็วคงที่ (สามารถปรับได้ตามขนาดของผลไม้ เช่น 0.5 ม./วินาที สำหรับแอปเปิ้ล และ 0.3 ม./วินาที สำหรับสตรอว์เบอร์รีขนาดเล็ก)
การจับภาพ : เมื่อเซ็นเซอร์ตำแหน่งตรวจพบผลไม้เข้าสู่โซนการถ่ายภาพ กล้อง RGB และ NIR จะทำการถ่ายภาพผลไม้นั้น 3–5 ภาพ จากมุมต่างๆ
การประมวลผลแบบเรียลไทม์ : ชุดขั้นตอนการประมวลผลเบื้องต้นจะดำเนินการประมวลผลภาพภายในเวลา < 0.5 วินาที และโมเดลการจำแนกประเภทจะสร้างการทำนายสถานะการเน่า (สมบูรณ์/เริ่มเน่า/เน่ารุนแรง) พร้อมคะแนนความเชื่อมั่น (เช่น ความเชื่อมั่น 98% สำหรับการเน่ารุนแรง)
การแยกผลไม้ : ตามผลการทำนาย ระบบจะส่งสัญญาณไปยังเครื่องกระตุ้นนิวแมติกหรือแขนหุ่นยนต์ที่ปลายสายพานลำเลียง ผลไม้ที่สมบูรณ์จะถูกส่งไปยังสายการ "บรรจุ" ผลไม้ที่เริ่มเน่าจะถูกส่งไปยังสถานี "ควบคุมคุณภาพ" เพื่อตรวจสอบซ้ำโดยคน (เพื่อลดผลบวกเทียม) และผลไม้ที่เน่ารุนแรงจะถูกเบี่ยงเบนไปยังถัง "ของเสีย"
บันทึกข้อมูล : ระบบจะบันทึกข้อมูลรหัสประจำตัวของผลไม้แต่ละลูก รูปภาพ ผลลัพธ์การจัดประเภท และคะแนนความมั่นใจลงในฐานข้อมูลบนคลาวด์ ข้อมูลเหล่านี้ถูกใช้เพื่อฝึกโมเดลการจำแนกประเภทใหม่เป็นระยะๆ ซึ่งช่วยเพิ่มความแม่นยำเมื่อมีการเก็บข้อมูลเพิ่มมากขึ้น
3. การประยุกต์ใช้งานจริงและประสิทธิภาพ: กรณีศึกษา
3.1 การตรวจจับแอปเปิ้ลเน่า
ความแม่นยำ : ระบบสามารถตรวจจับแอปเปิ้ลเน่าได้ด้วยความแม่นยำ 96.2% (เมื่อเทียบกับผู้ตรวจสอบด้วยมือที่มีความแม่นยำ 82.5%) โดยมีอัตราการแจ้งเตือนผิด (false positive) เพียง 2.1% (การตรวจสอบด้วยมือมีอัตรา false positive อยู่ที่ 7.8%)
ความเร็ว : ระบบสามารถประมวลผลแอปเปิ้ลได้ 120 ลูกต่อนาที เมื่อเทียบกับผู้ตรวจสอบด้วยมือที่สามารถตรวจสอบได้ 40 ลูกต่อนาที ทำให้ลดต้นทุนแรงงานลงได้ 67%
การตรวจพบในระยะแรก : กล้อง NIR สามารถตรวจจับอาการเน่าภายในแกนกลางของแอปเปิ้ลได้เร็วกว่าการตรวจสอบด้วยมือ 5–7 วัน ช่วยให้ฟาร์มสามารถคัดแยกผลไม้ที่ได้รับผลกระทบออกก่อนที่อาการเน่าจะแพร่กระจายระหว่างการจัดเก็บ
3.2 การตรวจจับสตรอว์เบอร์รี่เน่า
ความท้าทาย : สตรอว์เบอร์รี่มีความเปราะบางและเสี่ยงต่อการติดเชื้อราที่ผิวหนัง (เช่น Botrytis cinerea ) ซึ่งมักถูกละเลยโดยผู้ตรวจสอบด้วยมือเนื่องจากขนาดเล็ก

ผลลัพธ์ : กล้อง RGB ความละเอียดสูงของระบบและโมเดล CNN สามารถตรวจจับคราบราที่มีขนาดเล็กถึง 2 มิลลิเมตรได้ ด้วยความแม่นยำ 94.8% ส่งผลให้ลดการสูญเสียหลังเก็บเกี่ยวลงได้ 30% เมื่อเทียบกับกระบวนการคัดแยกแบบแมนนวลที่ฟาร์มใช้อยู่ก่อนหน้านี้
3.3 การตรวจจับเน่าของมะม่วง
ความท้าทาย : มะม่วงมักจะเกิดอาการ "เน่าจากขั้วผล" ซึ่งเริ่มจากบริเวณขั้วผล (พื้นที่ที่มองเห็นได้ยากในระหว่างการตรวจสอบด้วยสายตา) แล้วค่อยๆ ลุกลามเข้าสู่ภายใน
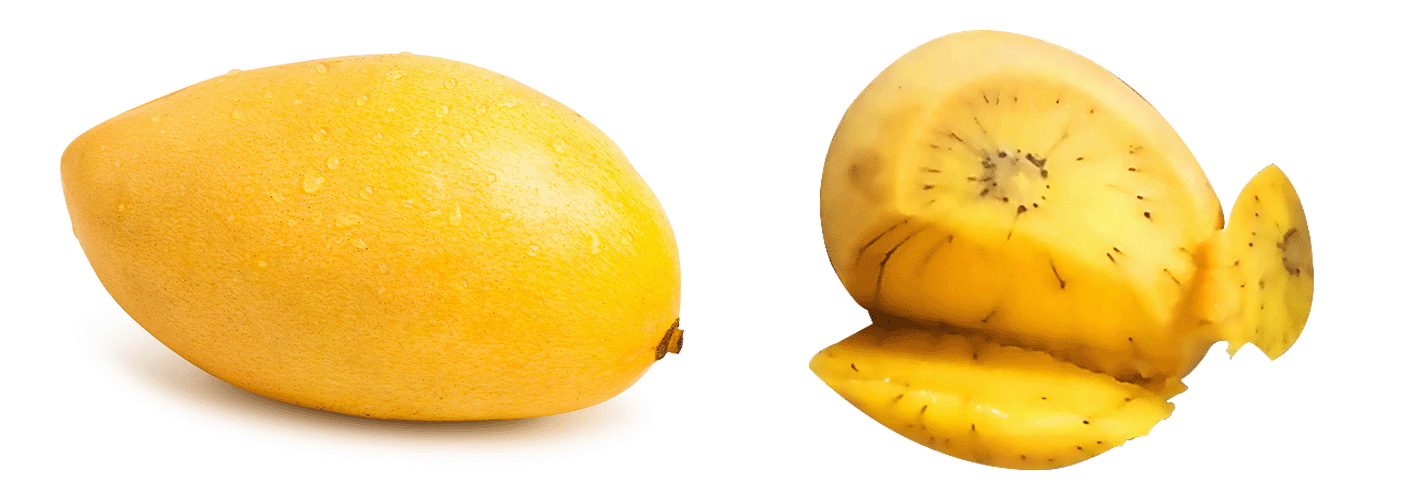
ผลลัพธ์ : ระบบการถ่ายภาพหลายมุม (รวมถึงกล้องด้านล่างที่โฟกัสเฉพาะที่ขั้วผล) และการวิเคราะห์ด้วยแสง NIR สามารถตรวจจับอาการเน่าจากขั้วผลได้ด้วยความแม่นยำ 95.5% ช่วยให้ศูนย์คัดบรรจุหลีกเลี่ยงการถูกปฏิเสธการจัดส่งไปยังตลาดส่งออก (ซึ่งต้องการมะม่วงที่ปราศจากอาการเน่าอย่างเคร่งครัด)
4. อุปสรรคและแนวทางในอนาคต
แม้โครงการนี้จะแสดงประสิทธิภาพที่ดีเยี่ยม แต่ยังคงมีอุปสรรคหลายประการที่จำเป็นต้องแก้ไข:
ความหลากหลายของพันธุ์ผลไม้ : โมเดลปัจจุบันทำงานได้ดีกับผลไม้ทั่วไป แต่ยังมีข้อจำกัดกับผลไม้หายากหรือเฉพาะพื้นที่ (เช่น ทุเรียน ลิ้นจี่) เนื่องจากข้อมูลการฝึกอบรมมีอยู่จำกัด งานในอนาคตจะมุ่งเน้นการขยายชุดข้อมูลผ่านความร่วมมือกับฟาร์มระดับโลก

การรบกวนสิ่งแวดล้อม : ความชื้นในสถานที่บรรจุภัณฑ์อาจทำให้เกิดการควบแน่นบนเลนส์กล้อง ส่งผลต่อคุณภาพของภาพ ทีมโครงการกำลังพัฒนาเคสกล้องกันน้ำพร้อมชั้นเคลือบป้องกันฝ้าเพื่อบรรเทาปัญหานี้
ความสามารถในการเข้าถึงด้านต้นทุน : ต้นทุนการติดตั้งเบื้องต้น (ประมาณ 50,000 ดอลลาร์สหรัฐ สำหรับฮาร์ดแวร์และซอฟต์แวร์) อาจสูงเกินไปสำหรับฟาร์มขนาดเล็ก รุ่นในอนาคตจะเน้นทางเลือกที่มีต้นทุนต่ำ เช่น การใช้กล้องสมาร์ทโฟนร่วมกับอุปกรณ์ประมวลผลแบบเอจ (เช่น Raspberry Pi) เพื่อลดต้นทุนลงได้ถึง 60%
5. สรุป
โครงการระบบปัญญาประดิษฐ์เพื่อการตรวจสอบผลไม้เน่าเสียถือเป็นการเปลี่ยนแปลงแนวทางปฏิบัติในกระบวนการควบคุมคุณภาพหลังการเก็บเกี่ยว โดยมุ่งแก้ไขข้อจำกัดและประสิทธิภาพที่ต่ำของการตรวจสอบด้วยวิธีการแบบดั้งเดิม ด้วยการผสานรวมเทคโนโลยีการถ่ายภาพขั้นสูง การประมวลผลภาพแบบเรียลไทม์ และการเรียนรู้ของเครื่อง (Machine Learning) ระบบดังกล่าวสามารถตรวจจับความเน่าเสียของผลไม้ได้อย่างรวดเร็ว มีความแม่นยำ และไม่ทำลายผลิตภัณฑ์ ช่วยลดปริมาณผลไม้สูญเสียหลังการเก็บเกี่ยว ลดต้นทุนแรงงาน และรักษามาตรฐานคุณภาพของผลไม้ให้คงที่เพื่อผู้บริโภค เมื่อเทคโนโลยีนี้พัฒนาจนเข้าถึงได้ง่ายขึ้นและสามารถปรับใช้กับผลไม้หลากหลายชนิด ก็มีศักยภาพที่จะเปลี่ยนแปลงห่วงโซ่อุปทานผลไม้ระดับโลก ส่งเสริมความยั่งยืนและความมั่นคงทางอาหารในยุคที่ความต้องการผลไม้สดเพิ่มสูงขึ้นอย่างต่อเนื่อง





