การถอดรหัสการทำงานของกล้องอุตสาหกรรม: เจาะลึกหลักการตรวจสอบ
กล้องอุตสาหกรรมคือดวงตาของระบบการมองเห็นของเครื่องจักร การเข้าใจหลักการพื้นฐานของมันคือกุญแจสู่การปรับปรุงประสิทธิภาพบทความนี้จะช่วยอธิบายเทคโนโลยีพื้นฐานที่อยู่เบื้องหลังระบบการมองเห็นด้วยกล้องอุตสาหกรรม เพื่อให้วิศวกรและผู้ที่สนใจสามารถเข้าใจกลไกการทำงานและปรับแต่งระบบให้ทำงานได้อย่างมีประสิทธิภาพ
1. องค์ประกอบหลักของกล้องอุตสาหกรรม
ก่อนที่เราจะเจาะลึกถึงหลักการ มาทำความเข้าใจกับองค์ประกอบพื้นฐานกันก่อน
ระบบออปติก: เลนส์คือหัวใจในการเก็บแสง การเลือกเลนส์ที่เหมาะสมกับการใช้งานในด้านมุมมอง ความลึกของสนามภาพ และความละเอียด ถือเป็นเรื่องสำคัญ ตัวอย่างเช่น กล้องที่มีความละเอียด 5 ล้านพิกเซล จำเป็นต้องใช้เลนส์ที่สามารถแยกแยะรายละเอียดเล็กๆ ให้เห็นได้ชัดเจนถึงระดับพิกเซล
เซ็นเซอร์: เซนเซอร์ CMOS หรือ CCD จะทำหน้าที่แปลงแสงเป็นสัญญาณไฟฟ้า ตัวชี้วัดสำคัญ รวม ประสิทธิภาพควอนตัม (QE) , ซึ่งโดย ideally ควรสูงกว่า 60% เพื่อการแปลงแสงที่เหมาะสมที่สุด, และ ระยะทางไดนามิก , ซึ่งควรจะมากกว่า 70 เดซิเบล เพื่อรองรับช่วงความเข้มของแสงที่กว้าง
ตัวประมวลผลภาพ: องค์ประกอบนี้ทำหน้าที่จัดการงานต่างๆ เช่น การประมาณค่าแบบเบเยอร์ (Bayer interpolation) , การลดความรุนแรง , และ การปรับสีให้ถูกต้อง , โดยใช้อัลกอริทึมต่างๆ เช่น เมทริกซ์ 3x3 เพื่อปรับสมดุลระดับขาว

2. หลักการพื้นฐานของระบบวิชันสำหรับกล้องอุตสาหกรรม
เมื่อภาพถูกจับแล้ว หลักการขั้นสูงเหล่านี้จะถูกนำมาใช้เพื่อแยกข้อมูลที่มีความหมายออกมา:
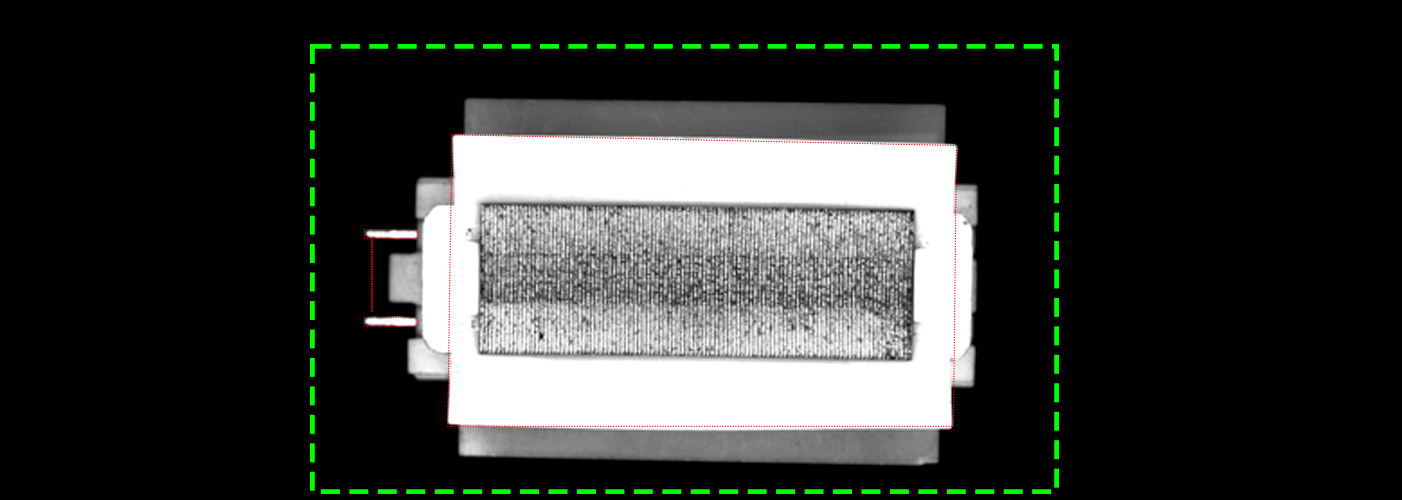
การแยกคุณลักษณะ (Feature Extraction): อัลกอริทึมอย่างเช่นตัวดำเนินการแคนนี (Canny operator) สำหรับ การตรวจจับขอบ (edge detection) หรือ การสหสัมพันธ์เชิงสัมพัทธ์แบบมาตรฐาน (Normalized Cross-Correlation (NCC)) สำหรับการจับคู่แม่แบบ (template matching) จะถูกนำมาใช้เพื่อระบุตำแหน่งของเป้าหมายเฉพาะด้วยความแม่นยำระดับย่อยพิกเซล (sub-pixel) ซึ่งมักจะบรรลุความแม่นยำที่ 0.1 พิกเซล
การแก้ไขภาพบิดเบือน (Distortion Correction): เพื่อให้แน่ใจว่าการวัดมีความแม่นยำ ภาพบิดเบือนจะถูกแก้ไขโดยใช้วิธีการปรับเทียบ (calibration) ซึ่งคำนวณค่าสัมประสิทธิ์การบิดเบือนแบบรัศมีและแบบสัมผัส (radial และ tangential distortion coefficients (k1,k2,p1,p2)) เพื่อรักษาความผิดพลาดในการวัดให้อยู่ในช่วง ±0.05 มม.
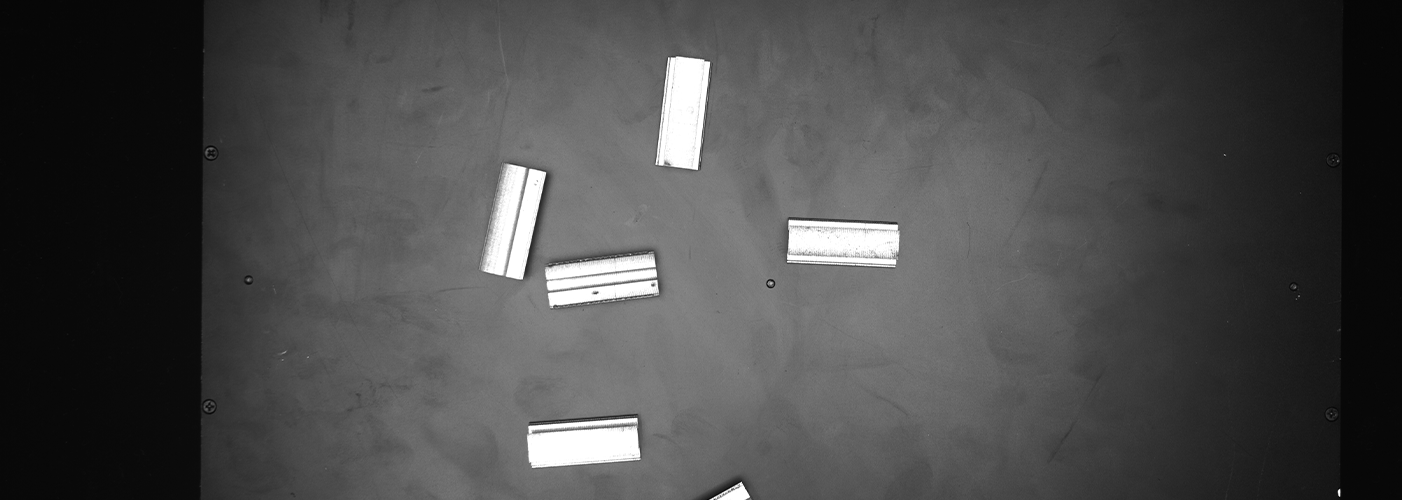
การชดเชยการเคลื่อนที่ (Motion Compensation): สำหรับวัตถุที่เคลื่อนที่ เป็นสิ่งสำคัญที่จะป้องกันการเบลอของภาพ สิ่งนี้ทำได้โดยการปรับระยะเวลาการเปิดรับแสง (exposure time) ตามความเร็วของวัตถุ (เช่น ระยะเวลาการเปิดรับแสง ≤500 ไมโครวินาที สำหรับวัตถุที่เคลื่อนที่ด้วยความเร็ว 1 เมตรต่อวินาที) และใช้ชัตเตอร์แบบกลุ่ม (global shutter)
3. การประยุกต์ใช้งานระบบกล้องอุตสาหกรรมในทางปฏิบัติ
หลักการเหล่านี้ถูกนำไปใช้ในอุตสาหกรรมต่าง ๆ ดังนี้:
การวัดขนาด: ด้วยการปรับเทียบพิกเซลให้สอดคล้องกับมาตราส่วนที่แท้จริง (เช่น 1 พิกเซล = 0.02 มม.) ระบบเหล่านี้สามารถดำเนินการวัดค่าได้อย่างแม่นยำสูงด้วยความซ้ำซ้อนที่ ±1 ไมครอน
การตรวจจับข้อบกพร่อง: โดยใช้แบบจำลองการเรียนรู้เชิงลึก เช่น ResNet18 กล้องอุตสาหกรรมสามารถจัดประเภทรอยขีดข่วนและข้อบกพร่องอื่น ๆ ด้วยความแม่นยำมากกว่า 99.5%
การนำทางหุ่นยนต์: ผ่านการปรับเทียบหลายจุด ระบบเหล่านี้สามารถนำทางหุ่นยนต์ได้โดยการแปลงพิกัดจากกล้องไปยังระบบพิกัดของหุ่นยนต์ด้วยข้อผิดพลาดที่น้อยมาก โดยทั่วไปน้อยกว่า 0.1°