

การรับรู้ภาพด้วยเครื่องจักรในการอ่านป้ายทะเบียน
ในยุคที่เทคโนโลยีก้าวหน้าอย่างรวดเร็ว การมองเห็นด้วยเครื่องจักร (machine vision) ได้กลายเป็นหัวใจหลักของระบบอัจฉริยะ ซึ่งเปลี่ยนแปลงอุตสาหกรรมต่างๆ โดยทำให้เครื่องจักรสามารถ "มองเห็น" และตีความข้อมูลภาพได้ หนึ่งในแอปพลิเคชันที่สำคัญคือ การรู้จำป้ายทะเบียนรถ (LPR) ซึ่งเป็นการประยุกต์ใช้งานที่มีประโยชน์จริงมากที่สุด โดยเปลี่ยนการจับภาพป้ายทะเบียนรถให้กลายเป็นเครื่องมือที่ช่วยปรับปรุงการบริหารจัดการจราจร เพิ่มความปลอดภัย และผลักดันการพัฒนาเมืองอัจฉริยะ
1. หลักการทำงานของระบบมองเห็นด้วยเครื่องจักรในการรู้จำป้ายทะเบียนรถ
การเก็บภาพ
ในฐานะพื้นฐานของระบบ LPR การถ่ายภาพใช้กล้องความละเอียดสูง (2–8 เมกะพิกเซล) และเซ็นเซอร์เฉพาะทางที่ติดตั้งไว้ตามจุดสำคัญ เช่น แยกถนน หรือทางเข้าลานจอดรถ อุปกรณ์เหล่านี้ได้รับการปรับแต่งค่าความเร็วชัตเตอร์ รูรับแสง และค่า ISO เพื่อให้ได้ภาพรถที่ชัดเจน พร้อมทั้งทำให้ป้ายทะเบียนสามารถแยกแยะได้อย่างชัดเจนสำหรับขั้นตอนการประมวลผลต่อไป

การประมวลผลภาพขั้นต้น
ภาพรถดิบมักมีสัญญาณรบกวน ความสว่างไม่สม่ำเสมอ และคอนทราสต์ต่ำ การประมวลผลล่วงหน้าจะแก้ปัญหานี้โดยการแปลงเป็นภาพระดับสีเทา (ทำให้ข้อมูลเรียบง่ายขึ้นแต่ยังคงโครงสร้างของป้ายทะเบียน), การลดสัญญาณรบกวน (การกรองแบบเกาส์เซียน/มีเดียน), และการเพิ่มความคมชัด (การทำให้ฮิสโตแกรมสมดุล) เพื่อทำให้รายละเอียดของป้ายทะเบียนเด่นชัดยิ่งขึ้นสำหรับการระบุตำแหน่ง
การระบุตำแหน่งป้ายทะเบียน
ขั้นตอนนี้แยกป้ายทะเบียนออกจากภาพรถโดยใช้คุณลักษณะเฉพาะของป้าย เช่น รูปร่าง (สี่เหลี่ยมผืนผ้ามาตรฐานที่มีอัตราส่วนแนวนอนคงที่), สี (เช่น สีน้ำเงิน-ขาว สำหรับรถยนต์พลเรือนในจีน), และพื้นผิว พื้นที่ป้ายจะถูกตัดออกมาจากองค์ประกอบที่ไม่เกี่ยวข้อง โดยใช้การตรวจจับขอบ (แคนนี) และการแบ่งส่วนตามสีร่วมกัน
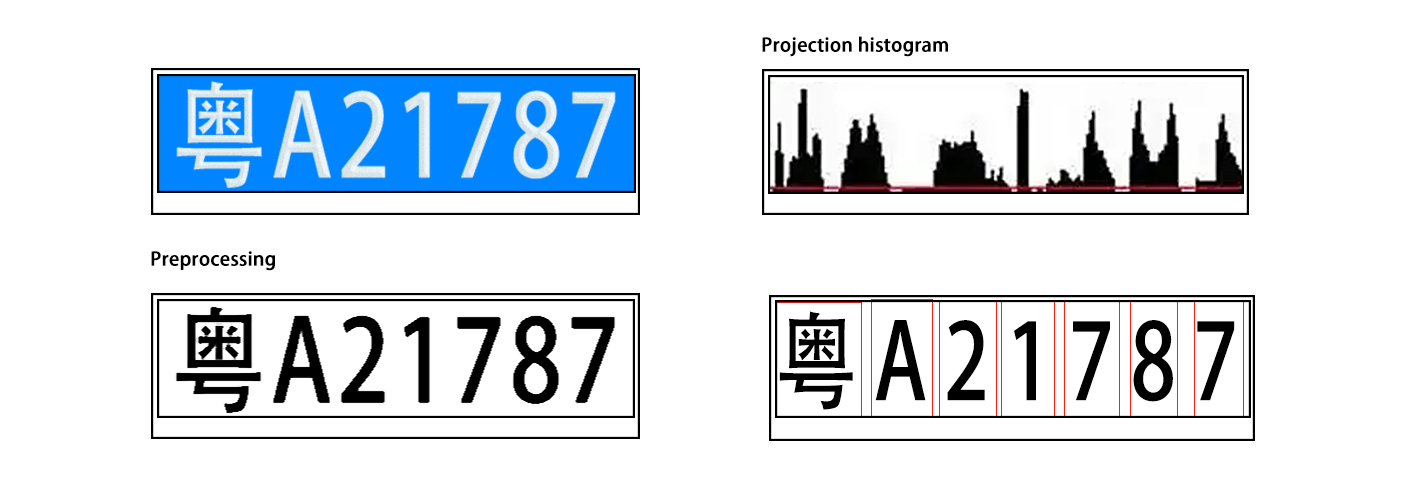
การแยกตัวอักษร
เพื่อเตรียมพร้อมสำหรับการจดจำ การแยกตัวอักษรจะแบ่งตัวอักษรบนป้ายออกเป็นภาพเดี่ยวๆ โดยใช้การฉายแนวราบ (ช่วงแนวตั้งของตัวอักษร) และการฉายแนวตั้ง (ตรวจจับช่องว่างระหว่างตัวอักษร) นอกจากนี้ยังมีการปรับแก้การเอียงสำหรับป้ายที่เอียง เพื่อให้การแยกตัวอักษรแต่ละตัวแม่นยำ
การตรวจจดจำตัวอักษร
ขั้นตอนหลักใช้เทคโนโลยีการรู้จำตัวอักษรด้วยภาพ (OCR, การเปรียบเทียบตามแม่แบบ) หรือการเรียนรู้เชิงลึก (CNNs, การเรียนรู้อัตโนมัติจากชุดข้อมูล) โดยตัวอักษรที่ถูกแบ่งส่วนแต่ละตัวจะถูกประมวลผล แปลงเป็นข้อความ และรวมเข้าด้วยกันเพื่อสร้างหมายเลขป้ายทะเบียนรถให้สมบูรณ์
2. การประยุกต์ใช้วิชันระบบจักรกลในการรู้จำป้ายทะเบียนรถ
การจัดการการจราจร
ระบบ LPR ที่ทางแยกและทางหลวงใช้สำหรับตรวจสอบยานพาหนะ รู้จำป้ายทะเบียน และเปรียบเทียบกับข้อมูลการฝ่าฝืน โดยจะจับภาพป้ายทะเบียน บันทึกเวลาและสถานที่ของความผิด จากนั้นส่งข้อมูลไปยังแพลตฟอร์มการจัดการ ซึ่งช่วยลดงานที่ต้องทำด้วยมือและเพิ่มความปลอดภัยบนท้องถนน
การจัดการที่จอดรถ
LPR ช่วยทำให้การดำเนินงานของที่จอดรถเป็นระบบอัตโนมัติ: กล้องจะจับภาพป้ายทะเบียนเมื่อเข้า (บันทึกเวลาเข้าและเปิดกั้นอัตโนมัติ) และเมื่อออก (คำนวณระยะเวลา สร้างค่าธรรมเนียมสำหรับการชำระเงินแบบไม่ใช้เงินสด) ซึ่งช่วยลดเวลาการรอคอยและกำจัดปัญหาที่เกี่ยวข้องกับตั๋ว
การเก็บค่าผ่านทาง
บนทางด่วนและอุโมงค์ การรู้จำป้ายทะเบียน (LPR) ช่วยให้การเก็บค่าผ่านทางเป็นไปอย่างต่อเนื่องไม่หยุดรถ โดยระบบจะรู้จำป้ายทะเบียน ตรวจสอบการจดทะเบียน และหักค่าธรรมเนียมโดยอัตโนมัติสำหรับยานพาหนะที่ลงทะเบียน (ลดเวลาทำธุรกรรมเหลือต่ำกว่า 1 วินาที) และสร้างใบแจ้งหนี้สำหรับยานพาหนะที่ไม่ได้ลงทะเบียน ช่วยบรรเทาปัญหาการจราจรติดขัด

การรักษาความปลอดภัยและการเฝ้าระวัง
เมื่อรวมเข้ากับกล้องในพื้นที่สาธารณะ ระบบ LPR จะสแกนป้ายทะเบียนและเปรียบเทียบกับรายชื่อที่เฝ้าระวัง (เช่น รถยนต์ที่ถูกโจรกรรม หรือยานพาหนะต้องสงสัย) หากพบความตรงกัน ระบบจะแจ้งเตือนเจ้าหน้าที่รักษาความปลอดภัยทันที ทำให้สามารถตอบสนองได้อย่างรวดเร็วและเพิ่มความปลอดภัยให้กับสาธารณะ
3. ข้อได้เปรียบของระบบ Machine Vision ในการรู้จำป้ายทะเบียน
ประสิทธิภาพสูง
ระบบ Machine Vision สามารถประมวลผลภาพได้หลายร้อยภาพต่อนาที โดยใช้เวลาในการรู้จำเพียง 0.1–0.5 วินาทีต่อคัน ซึ่งแตกต่างจากผู้ปฏิบัติงานที่ทำด้วยมือ ระบบนี้รักษาระดับการประมวลผลอย่างสม่ำเสมอ ช่วยลดต้นทุนและปรับปรุงคุณภาพการบริการ
ความแม่นยำสูง
อัลกอริทึมขั้นสูงและปัญญาประดิษฐ์ (AI) ทำให้ระบบมีความแม่นยำมากกว่า 99% ในสภาวะแวดล้อมที่เหมาะสม และมากกว่า 95% ในสภาพแวดล้อมที่ท้าทาย—สูงกว่าการรู้จำด้วยมนุษย์มาก (ซึ่งมีอัตราความผิดพลาดมากกว่า 5%) สิ่งนี้ช่วยให้มั่นใจได้ถึงความน่าเชื่อถือในการเก็บค่าผ่านทางและการรักษาความปลอดภัย
การใช้งานตลอด 24/7
ติดตั้งเซ็นเซอร์ตรวจจับแสงต่ำและกล้องที่ทนต่อสภาพอากาศ LPR ทำงานได้ตลอดเวลา ระบบแสงอินฟราเรด/LED ช่วยในการจับภาพในเวลากลางคืน และอัลกอริธึมปรับปรุงภาพช่วยลดผลกระทบจากสภาพอากาศ เพื่อให้มั่นใจถึงการดำเนินงานอย่างต่อเนื่อง
การจัดการและวิเคราะห์ข้อมูล
ผลลัพธ์การรู้จำ (หมายเลขป้ายทะเบียน เวลา สถานที่ รูปภาพ) จะถูกจัดเก็บในฐานข้อมูลกลางเพื่อการค้นหาอย่างรวดเร็ว ข้อมูลจะถูกวิเคราะห์เพื่อระบุแนวโน้ม—เช่น การปรับปรุงสัญญาณจราจร การปรับราคาที่จอดรถ หรือการติดตามยานพาหนะที่ต้องสงสัย
4. ความท้าทายและแนวทางแก้ไขในการรู้จำป้ายทะเบียนแบบใช้วิชันเครื่องจักร
สภาพแวดล้อมที่ท้าทาย
สภาพอากาศเลวร้าย (ฝน หมอก แสงสะท้อน) การเปลี่ยนแปลงของแสง และป้ายทะเบียนที่สึกหรอ ทำให้ความแม่นยำลดลงเหลือน้อยกว่า 80% ในกรณีรุนแรง ส่งผลต่อความน่าเชื่อถือ

สถานการณ์ยานพาหนะที่ซับซ้อน
การบัง (ป้ายทะเบียนถูกบัง) มุมเอียง/ภาพบิดเบี้ยว และสถานการณ์ที่มีหลายป้ายทะเบียน รบกวนการรู้จำ เนื่องจากอัลกอริธึมแบบดั้งเดิมมีปัญหาในการจัดการข้อมูลนำเข้าที่ไม่เป็นมาตรฐาน
แนวทางแก้ไขและแนวทางการปรับปรุง
การปรับปรุงฮาร์ดแวร์ (กล้อง HDR, ไฟอินฟราเรด) และการปรับปรุงอัลการิทึม (การลดเสียงปรับปรุง, การกําจัดหมอก) แก้ปัญหาสิ่งแวดล้อม การแก้ไขความคดคล้ํา การจัดการกับการปิดกั้น และการเรียนรู้ลึก (CNNs ที่ใช้ในภูมิภาค) รับมือกับฉากที่ซับซ้อน การบํารุงรักษาและอัพเดทระบบเป็นประจํา เพื่อให้ระบบมีความแม่นยํา
5. แนวโน้มในอนาคตของเครื่องมองเห็นในการจําแนกป้ายทะเบียน
การเรียนรู้ลึกและการบูรณาการ AI
รูปแบบที่พัฒนาขึ้น (แปลงแปลง, การเรียนรู้ในช่วงเวลาไม่กี่ครั้ง) รับมือกับกรณีที่ยาก (แผ่นที่สวมชุด) ระบบ LPR ทั่วไป (เครือข่ายประสาทเดียวสําหรับทุกขั้นตอน) ทําให้การออกแบบง่ายขึ้น และ AI ทํานายพฤติกรรมของยานสําหรับการจัดการอย่างระวัง
มูลติเซนเซอร์ฟิวชั่น
LPR จะรวม LiDAR (ข้อมูลยานพาหนะ 3 มิติ) รادار (ความเร็ว / ระยะทาง) และกล้องความร้อน (สภาพมืด / ควัน) การรวมข้อมูลลดความผิดพลาด ทําให้ระบบแข็งแรงขึ้นสําหรับการใช้ในพื้นที่นอกถนนและฉุกเฉิน
บริการที่ใช้ระบบคลาวด์
LPR ที่ใช้ระบบคลาวด์ (cloud-based LPR) ให้ความสามารถในการปรับขนาด (เพิ่มกล้องโดยไม่ต้องปรับปรุงฮาร์ดแวร์) การบริหารระยะไกล และการบูรณาการระหว่างระบบ (การแบ่งปันข้อมูลกับแพลตฟอร์มเมืองฉลาด) การเก็บข้อมูลในเมฆรองรับการวิเคราะห์ระยะยาวสําหรับการใช้งานขนาดใหญ่
6. บทสรุป
มุมมองเครื่องจักรเป็นกระดูกสันหลังของ LPR ที่ทันสมัย แก้ปัญหาของระบบมือด้วยความเร็ว ความแม่นยํา และการทํางานตลอด 24 ชั่วโมง ความก้าวหน้าในด้านการเรียนรู้ลึก การรวมตัวของหลายเซนเซอร์ และเทคโนโลยีเมฆ ชนะปัญหา เมื่อเมืองฉลาดเติบโต LPR จะมีบทบาทสําคัญในการเชื่อมต่อยานพาหนะ รากฐานพื้นฐาน และผู้ใช้





