

Поради щодо інтеграції камер рівня плати для інженерів
Вибір правильного інтерфейсу для інтеграції камер на рівні плати
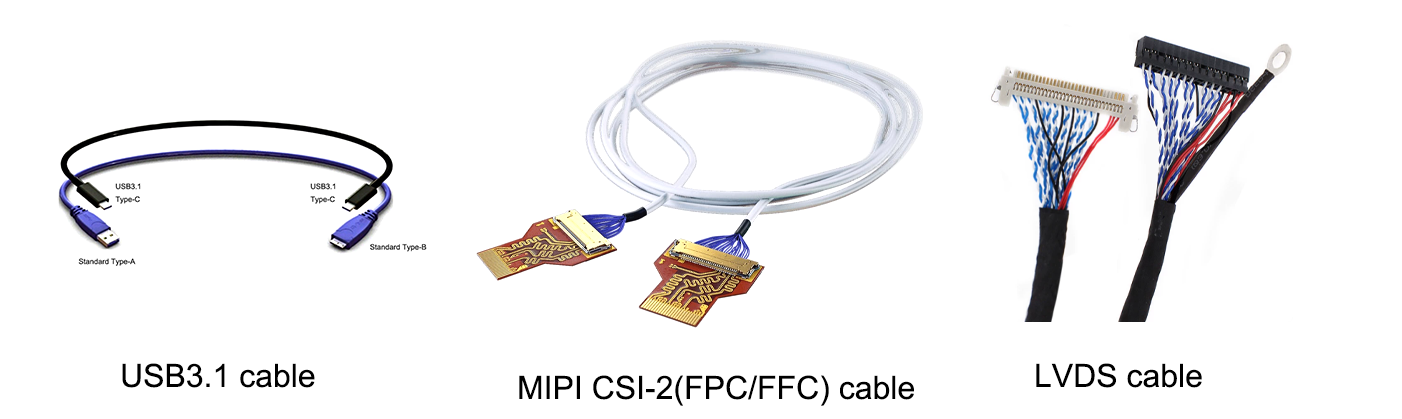
USB 3.1, MIPI CSI-2 та LVDS: компроміси щодо пропускної здатності, затримки та синхронізації в реальному часі
Інженери-розробники вбудованих систем стикаються з критичними компромісами під час вибору інтерфейсів для інтеграції камер на рівні плати. USB 3.1 забезпечує високу пропускну здатність (5 Гбіт/с), що робить його придатним для потокового передавання HD-відео, але накладні витрати протоколу вносять затримку 5–10 мс, що обмежує його придатність для контурів реального часу. MIPI CSI-2 пропонує масштабовану пропускну здатність (до 6 Гбіт/с на лінію) та синхронізацію, що активується апаратним тригером, забезпечуючи затримку менше одного мілісекунди та точне синхронізоване включення кількох датчиків — що ідеально підходить для промислової автоматизації та робототехніки. LVDS забезпечує детерміновану передачу з наднизькою затримкою (<1 мс) за допомогою простих послідовних протоколів, хоча пропускна здатність на канал обмежена приблизно 655 Мбіт/с, що обмежує його використання лише для потоків з нижчим розділенням або стиснених даних. Системи машинного зору, які вимагають точної синхронізації між камерами, повинні надавати перевагу MIPI CSI-2; у критичних для безпеки застосуваннях, наприклад, у системах сприйняття автономних транспортних засобів, важлива передбачуваність часових параметрів LVDS. USB 3.1 залишається життєздатним варіантом для бюджетних систем HD-моніторингу, де не потрібна робота в реальному часі, а незначна затримка є прийнятною — за умови, що перевірені теплові та обчислювальні обмеження.
Найкращі практики забезпечення цілісності сигналу та розміщення компонентів на друкованій платі від Interface
Цілісність сигналу є специфічною для кожного інтерфейсу й є фундаментальною умовою надійної роботи камер на рівні друкованої плати. Для USB 3.1 необхідно підтримувати диференційний імпеданс 90 Ом із парами провідників однакової довжини (±5 міл), трасуванням із екрануванням заземленням та суворим відокремленням від шумних цифрових слідів задля придушення ЕМІ. Для MIPI CSI-2 потрібен імпеданс 100 Ом на кожну диференційну лінію, узгодження довжини провідників у межах ±10 міл і уникнення використання перехідних отворів поблизу приймачів — особливо критично для високошвидкісних ліній, що працюють з частотою понад 1,5 Гбіт/с. При трасуванні LVDS необхідно забезпечити коротку довжину провідників (<10 дюймів), постійний імпеданс 100 Ом і захисні провідники задля придушення взаємних наводок. У всіх інтерфейсах слід розділяти площини заземлення, щоб ізольовати аналогові сенсорні кола від цифрових доменів ISP та процесора, розміщувати декапуючі конденсатори в межах 2 мм від виводів живлення та використовувати багатошарові конструкції з чотирма й більше шарами з неперервними опорними площинами. Неправильне трасування відповідає за 32 % артефактів зображення в прототипних системах машинного зору — тому пост-трасувальна симуляція та верифікація імпедансу є обов’язковими для проектів, де вимагається максимальна надійність.
Механічна інтеграція: кріплення об’єктива та оптична гнучкість
Точне кріплення лінз є обов’язковим: навіть мікронні неточності вирівнювання призводять до зміщення фокусу, спотворення зображення або втрати роздільної здатності. Інженерам необхідно знайти баланс між механічною жорсткістю — що критично важливо для стійкості до ударів і вібрацій — та можливістю регулювання на місці, яку зазвичай забезпечують різьбові корпуси або кріплення з прокладками. Оптична гнучкість вимагає сумісності з різними типами лінз (з фіксованим фокусом, зміннофокусними, рідинними) та підтримки налаштування фокусної відстані за допомогою гелікоподібних механізмів або моторизованих контролерів. Розходження в коефіцієнтах теплового розширення між лінзами та сенсорами вимагають заходів щодо їх усунення — наприклад, використання матеріалів із низьким коефіцієнтом теплового розширення (наприклад, інвару, керамічних композитів) або кінематичних кріплень — особливо в промислових умовах (від −40 °C до +85 °C). У разі інфрачервоного або багатоспектрального зображення прозорість матеріалу підкладки в цільовому діапазоні (наприклад, германій для ДІЧ-діапазону, кварцове скло для УФ-діапазону) стає первинним обмеженням при проектуванні. Модульні інтерфейси лінз дозволяють швидко замінювати лінзи без повної повторної калібрування, проте допуски відстані фланця мають залишатися меншими за 10 мкм, щоб запобігти віньєтуванню або погіршенню функції передачі модуляції (MTF).

Забезпечення надійного співіснування на рівні системи в конструкціях камер на рівні плати
Зменшення електромагнітних перешкод та розподіл площини заземлення для співіснування сенсора й ISP
Проекти камер на рівні плат без корпусу не мають екранування від електромагнітних перешкод (EMI), що збільшує відповідальність за ізоляцію на рівні друкованої плати між зображеннями сенсорів та процесорами обробки зображень (ISP). Розділені заземлювальні площини — які відокремлюють аналогові домени сенсорів від цифрових підсистем ISP — є обов’язковими для мінімізації провідного зв’язку шумів, оскільки завади у змішаних сигналів можуть викликати гармоніки тактової частоти понад 50 дБ·мкВ/м (IEC 61000-4-3). Ефективні стратегії включають заземлення «зіркою» у точці входу живлення, охоронні сліди зі з’єднувальними отворами навколо високошвидкісних цифрових ліній, уникнення теплових розвантажень у заземлювальних заливках поблизу сенсорів, а також встановлення феритових кульок на лініях тактового сигналу I²C. Цілісність сигналу швидко погіршується, коли відстань між сенсором та ISP стає меншою за 3λ максимальної робочої частоти — що вимагає маршрутизації з контролем хвильового опору та диференційних пар однакової довжини. На етапі раннього прототипування використання близькопольових EMI-зондів (з відстанню 5 мм) дозволяє виявити «гарячі точки»; локальне екранування сенсорів за допомогою му-металу зменшує випромінювані перешкоди на 12–18 дБ (FCC OET-65). Збереження мінімальної відстані ≥40 мил між доменами змішаних сигналів постійно покращує співвідношення сигнал/шум (SNR) на 20 % у модулях високої роздільної здатності.
Інтеграція програмного забезпечення та переносимість SDK для камер на рівні плати
Підтримка драйверів для крос-платформ: Linux RT, QNX та «голі» RTOS з Spinnaker
Портативність програмного забезпечення між різними платформами є обов’язковою вимогою для розгортання вбудованих систем машинного зору в середовищах Linux у реальному часі (RT), QNX та ресурсно-обмежених «голих» RTOS. Кожна операційна система накладає свої вимоги до часових параметрів, управління пам’яттю та моделей драйверів — проте повинна зберігатися стабільна, піксельно-точна збірка зображень і синхронізація за апаратним тригером. Єдиний абстрактний рівень SDK усуває цей розрив: наприклад, SDK Spinnaker надає стандартизовані API для платформ x86, ARM та RISC-V і при цьому нативно підтримує захоплення кадрів у реальному часі, синхронізацію за апаратним тригером та доступ до регістрів ISP. Це усуває необхідність повторної розробки драйверів під час міграції від промислових ПК на базі Linux RT до цілей на основі мікроконтролерів із RTOS. Команди, які використовують такі фреймворки, скорочують час інтеграції до 40 %, зберігаючи детерміновану поведінку навіть за умов теплового зниження продуктивності або масштабування напруги.
Готові спростити інтеграцію камер на рівні плати для виробництва OEM?
Безшовний інтеграція камер на рівні плати є краєугольним каменем надійних вбудованих систем машинного зору з високою продуктивністю — жоден передовий алгоритм чи апаратне забезпечення для обробки не зможе компенсувати поганий вибір інтерфейсу, проблеми з цілісністю сигналу чи неоптимальний механічний дизайн. Дотримуючись перевірених на практиці рекомендацій щодо інтеграції та співпрацюючи з постачальником камер, який пропонує попередньо перевірене апаратне забезпечення, технічну підтримку опорних проектів та програмні інструменти, сумісні з різними платформами, ви скоротите кількість ітерацій у процесі проектування, прискорите вихід продукту на ринок та забезпечите стабільну й економічно ефективну продуктивність у серійному виробництві для OEM-замовників.
Для промислових рішень у вигляді камер на рівні плат, адаптованих до вашого застосування в галузі вбудованого машинного зору, або для отримання повних пакетів еталонних проектів, внутрішньої інженерної підтримки та спеціальних послуг OEM-виробництва (які надає HIFLY), співпрацюйте з постачальником, що має глибокі корені в галузі промислового машинного зору. 15-річний досвід HIFLY охоплює розробку камер на рівні плат, повну OEM/ODM-адаптацію та комплексну інтеграцію вбудованих систем машинного зору «під ключ» — з підтвердженням відповідності стандарту ISO 9001:2015, підтримкою відповідності глобальним нормативним вимогам та спеціалізованими інженерними послугами на етапі впровадження проекту. Зв’яжіться з нами вже сьогодні, щоб отримати безкоштовну консультацію, розробити спеціальний прототип або оптимізувати процес інтеграції камер на рівні плат у вашій робочій схемі.





