

Чотири загальних типи 3D-бачення
З розвитком технології 3D-бачення виникли різні рішення для задовolenня різних промислових та комерційних потреб. У цій статті HIFLY розглядається чотири поширені технології 3D-зображення, аналiзуючись їх принцип роботи, переваги, обмеження та типові сценарії застосування.
1. Стереокамера
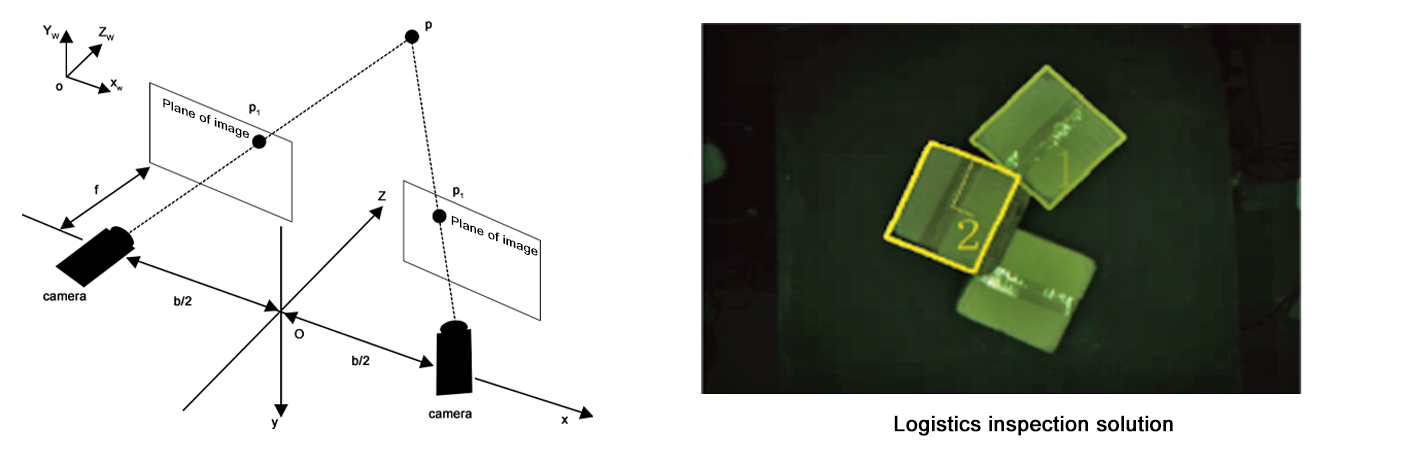
Працюючи подібно до людського бінокулярного бачення, стереовізуальні системи використовують дві камери під кутом для отримання зображень з трохи різних перспектив. Шляхом обчислення піксельного зсуву (розподілу) між двома зображеннями система може оцінити інформацію про глибину та реконструювати 3D-моделі.
Переваги:
Невисока вартість апаратного забезпечення
Проста архітектура системи
Легка реалізація та експлуатація
Обмеження:
Обмежена точність (зазвичай на рівні міліметрів)
Недостатньо для високоточних промислових застосунків
Застосування: Початкова ідентифікація об'єктів, навігація автономних транспортних засобів та вимірювання глибини для споживчих пристроїв.
2. Лазерний лінійний профілер
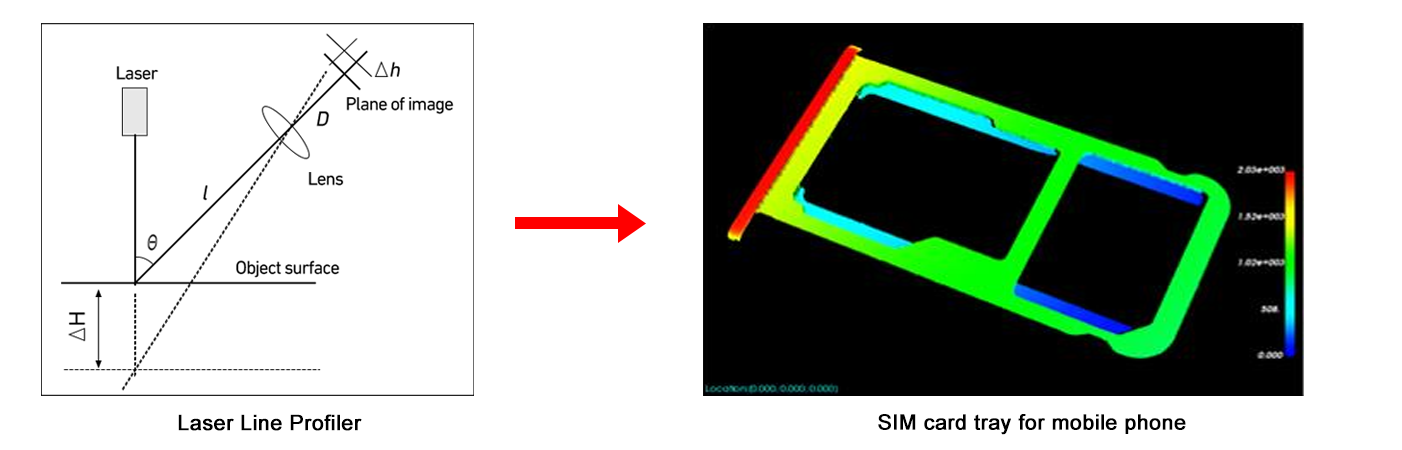
Ця система об'єднує проектор лазерної лінії з камeroю, розміщеною під фiксованим кутом. Поки лазерна смуга сканує рухомий об'єкт, камера зафіксувує викривлення у проекційній лінії для генерації 3D точкових облаків.
Переваги:
Виняткова точність по Z-осі (рівень підмікронного)
Точність XY-осі в межах десятків мікронів
Ідеальна для вимірювання плоскості/високої точності висоти
Обмеження:
Необхідна координована механічна рухова система
Показники продуктивності погіршуються при наявності відбивальних поверхонь
Промислове домінування: На сьогодні це найширокше розповсюджений розв'язок 3D-бачення у виробництві для якісного контролю та вимірювання розмірів.
3. Структурована світлина 3D камера
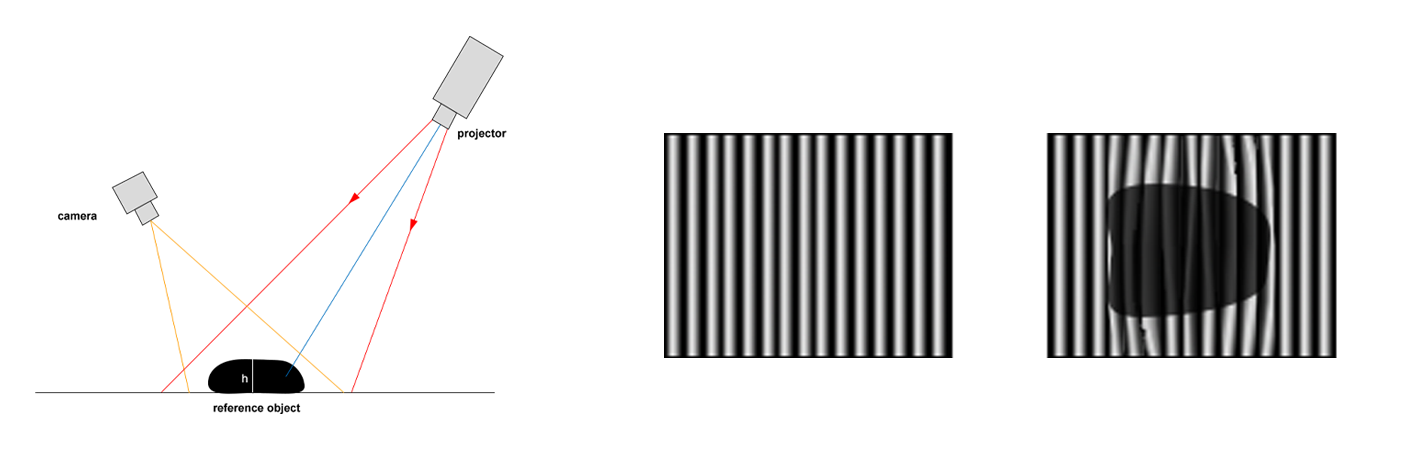
Ця технологія проєктує закодовані світлові шаблони (сітки або крапки) на об'єкти. Одна або кілька камер потім аналізують зміщені шаблони, що викликаються поверхнею об'єкта, щоб обчислити 3D координати.
Переваги:
Вимірювання без контакту
Здатність сканування без руху
Точність на рівні мікронів у малих полях зору
Ефективний у великомасштабних застосуваннях
Обмеження:
Вищі вартості обладнання
Чутливий до завад від оточуючого світла
Головне призначення: 3D випадкове захоплення
4. Сканер лазерний за принципом часу переліту (ToF)
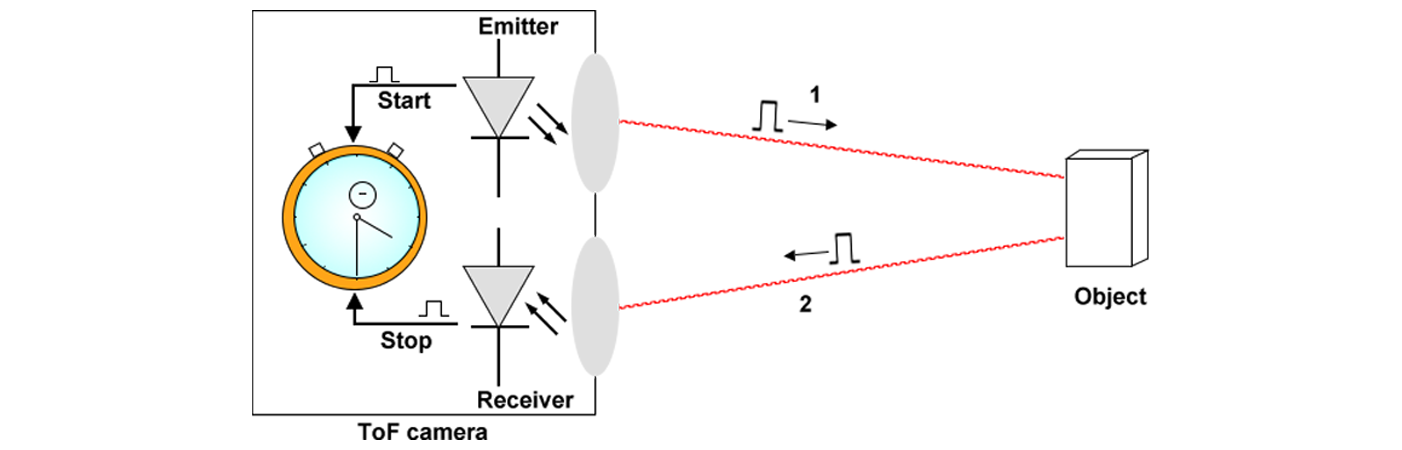
Системи ToF вимірюють час подорожі інфрачервоних лазерних імпульсів для розрахунку відстаней. Ця безпосередня вимірювання часу переліту дозволяє здійснювати 3D мапування у режимі реального часу.
Переваги:
Відмінна продуктивність у режимі реального часу
Захоплення глибини всією площею
Компактні розміри системи
Обмеження:
Обмежена точність вимірювань
Піддається впливу багатовимірного завадження
Комерційна поширеність: Широко використовується в споживчій електроніці (VR/AR), системах безпеки та медичному зображення. Промислове застосування головним чином обмежене униканням перешкод АГВ та базовою навігацією.
Посібник з порівняння та вибору технологій
Кожна технологія відзначається успішністю у певних сценаріях:
Застосунки, щоправда на вартість: Стереовізор
Вимоги до надточної точності: Профілювання лазерною лінією
Сканування складних поверхонь: Структурована світлина
Сенсоринг в режимі реального часу: Системи ToF





