

Машинне бачення у розпізнаванні номерних знаків
У епоху швидкого технологічного прогресу машинне бачення стало основою інтелектуальних систем, трансформуючи галузі завдяки можливості машин «бачити» та інтерпретувати візуальні дані. Серед його застосувань розпізнавання номерних знаків (LPR) є одним із найбільш практичних, перетворюючи зйомку номерних знаків на інструмент, який оптимізує управління рухом, підвищує безпеку та сприяє розвитку розумних міст.
1. Принцип машинного бачення у розпізнаванні номерних знаків
Отримання зображення
Як основа LPR, отримання зображень використовує камери високої чіткості (2–8 мегапікселів) та спеціалізовані датчики, встановлені в ключових місцях (перехрестя, в'їзди на парковки). Ці пристрої калібруються за швидкістю затвора, діафрагмою та ISO для отримання чітких зображень транспортних засобів, забезпечуючи чітке розрізнення номерних знаків для подальшої обробки.

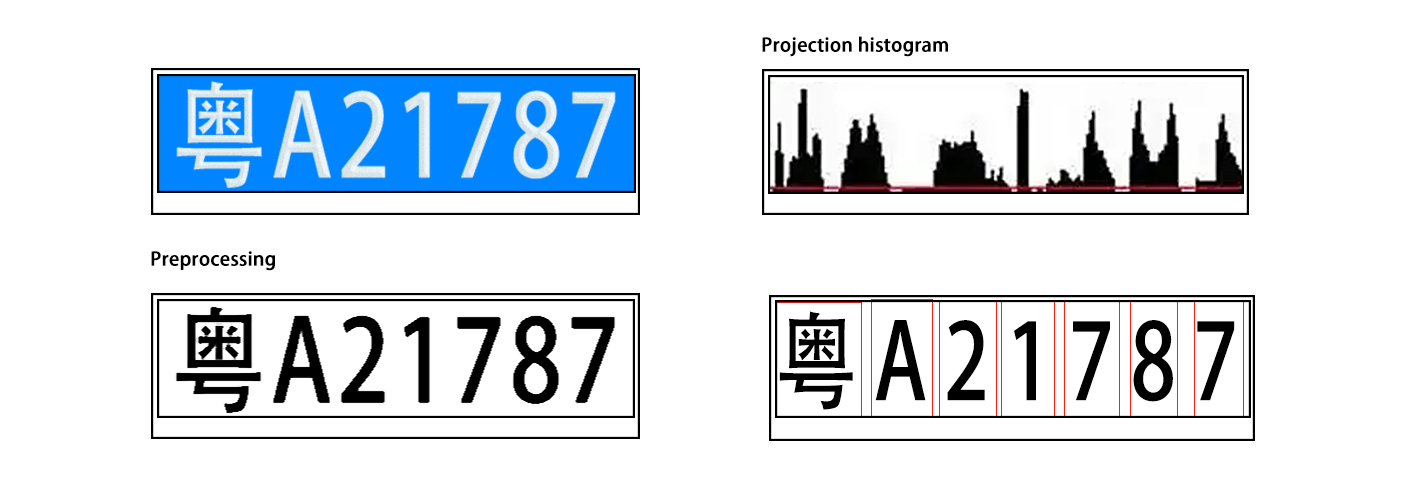
Попередня обробка зображення
Сирі зображення транспортних засобів часто мають шум, неоднорідну яскравість і низьку контрастність. Попередня обробка виправляє це шляхом перетворення в градації сірого (спрощення даних із збереженням структури номерного знака), зменшення шуму (гауссовий або медіанний фільтри) та підвищення контрастності (виравнювання гістограми), що робить деталі номерного знака більш чіткими для його локації.
Локація номерного знака
На цьому етапі номерний знак виділяється з зображення транспортного засобу за його унікальними ознаками: формою (стандартний прямокутник із фіксованим співвідношенням сторін), кольором (наприклад, блакитно-білий для цивільних автомобілів у Китаї) та текстурою. Виявлення країв (Кенні) та сегментація за кольором працюють разом, щоб вирізати область номерного знака, виключивши зайві елементи.
Сегментація символів
Для підготовки до розпізнавання сегментація символів розділяє символи на окремі зображення. Використовуються горизонтальна проекція (вертикальний діапазон символів) та вертикальна проекція (виявлення проміжків між символами). Для похилих номерних знаків застосовується корекція нахилу, що забезпечує точне розділення кожного символа.
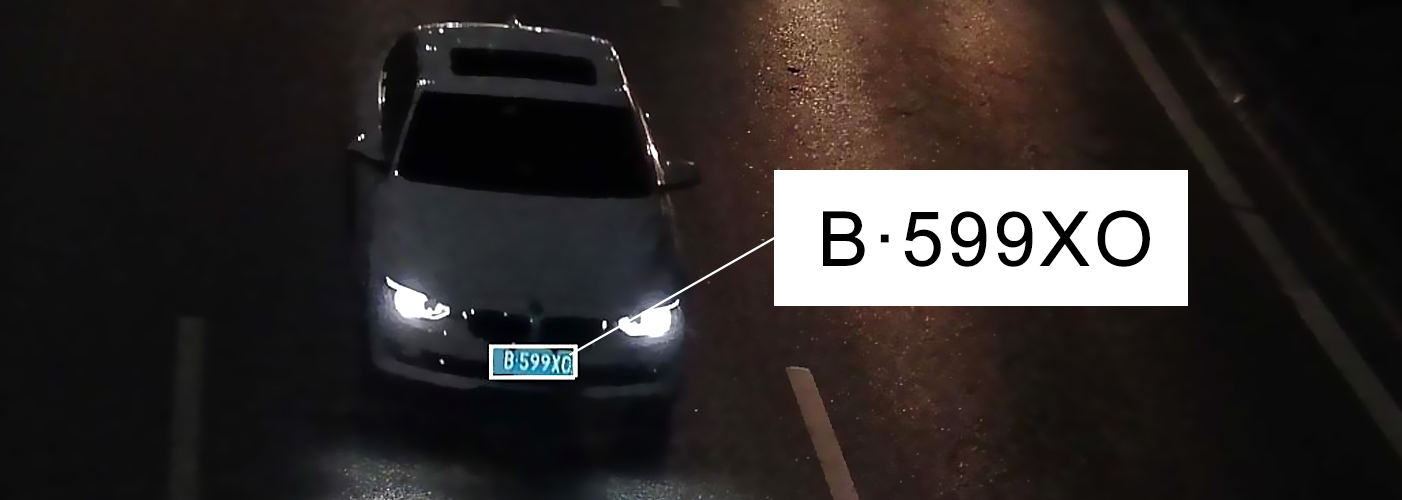
Розпізнавання символів
Основний крок використовує оптичне розпізнавання символів (OCR, порівняння на основі шаблонів) або глибоке навчання (згорткові нейронні мережі, автоматичне навчання на наборах даних). Кожен сегментований символ обробляється, перетворюється на текст і поєднується у повний номерний знак.
2. Застосування машинного зору у розпізнаванні номерних знаків
Організація руху
Системи LPR на перехрестях та автомагістралях контролюють транспортні засоби, розпізнають номери й зіставляють їх із даними про порушення. Вони фіксують номери, записують час і місце порушення та передають інформацію на платформи управління, зменшуючи обсяг ручної роботи та підвищуючи безпеку дорожнього руху.
Керування паркінгом
LPR автоматизує роботу паркінгів: камери знімають номери на в'їздах (фіксуючи час в'їзду, відкриваючи бар'єри) та на виїздах (розраховуючи тривалість перебування, формуючи оплату для безготівкової сплати). Це скорочує час очікування та усуває проблеми, пов'язані з квитками.
Оплата проїзду
На автомагістралях та тунелях LPR дозволяє безпеременно збирати плат. Він розпізнає номерні знаки, перевіряє реєстрацію, автоматично відбирає збори за зареєстровані автомобілі (з скороченням часу транзакції до <1 секунди) і генерує рахунки за незареєстровані, полегшуючи затоплення.

Безпека та спостереження
Вбудований в камери громадських територій, LPR сканує номерні знаки та збігається з списками спостерігачів (вкрадені автомобілі, підозрілі транспортні засоби). Він попереджає охоронців про збиття, що дозволяє швидко реагувати і підвищувати громадську безпеку.
3. Переваги машинного зору в розпізнаванні номерних знаків
Висока ефективність
Машинне бачення обробляє сотні зображень в хвилину, з часом розпізнавання 0,10,5 секунди на автомобіль. На відміну від ручних операторів, він підтримує постійну продуктивність, знижує витрати і покращує обслуговування.
Висока точність
Просунуті алгоритми та штучний інтелект дозволяють більш ніж 99% точність в ідеальних умовах, і > 95% в складних умовах набагато вище, ніж ручне розпізнавання (5% + рівень помилок). Це забезпечує надійність збору долі та безпеку.
24/7 операція
З одиницями, що контролюють світло, і камерами, що не піддаються погодним обставам, LPR працює безперервно. Інфрачервоне / LED освітлення допомагає утримувати нічне світло, а алгоритми підвищення зменшують вплив погоди, забезпечуючи безперервну роботу.
Керування даними та їх аналіз
Результати розпізнавання (номер номеру, час, місцезнаходження, зображення) зберігаються в централізованій базі даних для швидкого пошуку. Дані аналізуються для виявлення тенденційоптимізації сигналів проїзду, коригування тарифів паркування або відстеження підозрілих транспортних засобів.
4. Виклики та рішення в машиновізійному розпізнаванні номерних знаків
Складних умовах
Екстремальні погодні умови (дощ, туман, блиск), зміни освітлення та зношені пластини знижують точність до <80% у важких випадках, що впливає на надійність.

Складні знімки автомобілів
Окклюзія (блоковані пластини), нахил/розкриття та сценарії з декількома пластинами порушують розпізнавання, оскільки традиційні алгоритми борються з нестандартними входами.
Вирішення та поліпшення
Оптимізація апаратного забезпечення (HDR-камери, інфрачервоне освітлення) та поліпшення алгоритмів (адаптивне зниження шуму, видалення туманності) вирішують екологічні проблеми. Коррекція хибкості, обробка окулюції та глибоке навчання (регіональні CNN) вирішують складні сцени. Регулярне обслуговування і оновлення підтримують точність систем.
5. Майбутні тенденції машинного зору в розпізнаванні номерних знаків
Глибоке навчання та інтеграція ШІ
Досконалі моделі (трансформатори, навчання з кількома пострілами) обробляють складні випадки (насіті пластини). Системи LPR від кінця до кінця (одина нейронна мережа для всіх кроків) спрощують дизайн, а штучний інтелект передбачає поведінку транспортного засобу для проактивного управління.
Мультисенсорний синтез
LPR буде інтегрувати LiDAR (3D дані про транспортні засоби), радар (швидкість / відстань) та теплові камери (темність / дим). Фузія даних зменшує помилки, що робить системи більш надійними для бездорожнього і аварійного використання.
Облачні послуги
Облачна LPR пропонує масштабуваність (додавати камери без апаратних модернізацій), віддалене управління та інтеграцію міжсистеми (обмін даними з платформами розумних міст). Хмарний зберігання підтримує довгостроковий аналіз для масштабних додатків.
6. Висновок
Машинне бачення є основою сучасного ЛПР, вирішуючи проблеми ручної системи з швидкістю, точністю і 24/7 роботою. Дорогі досягнення в області глибокого навчання, мультисенсорного синтезу та хмарних технологій долають проблеми. Оскільки розумні міста зростають, LPR відіграє ключову роль у з'єднання транспортних засобів, інфраструктури та користувачів, формуючи розумний транспорт.





