

Wskazówki dotyczące integracji kamer poziomu płytki dla inżynierów
Wybór odpowiedniego interfejsu do integracji kamery na poziomie płytki
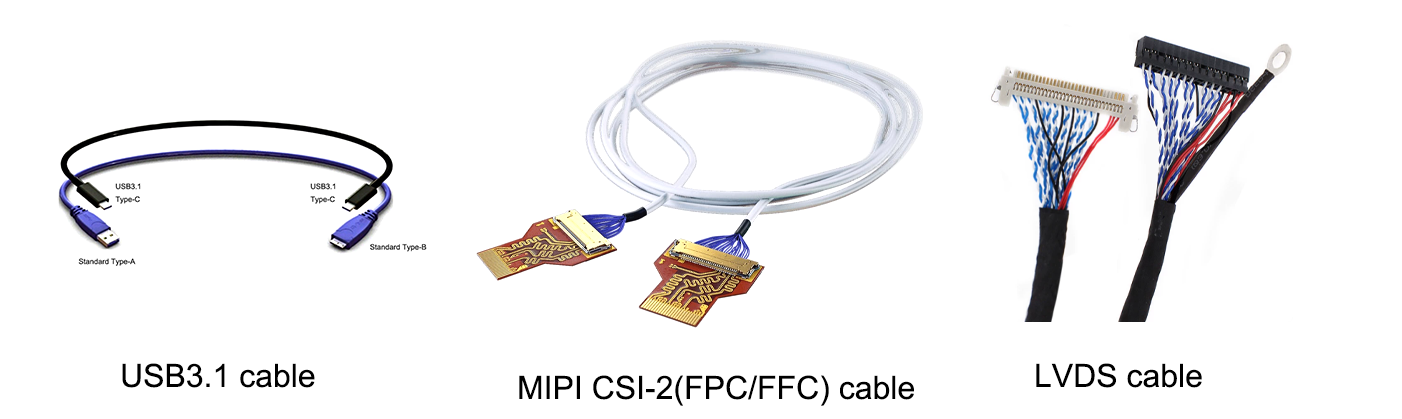
USB 3.1, MIPI CSI-2 i LVDS: kompromisy związane z przepustowością, opóźnieniem oraz synchronizacją w czasie rzeczywistym
Inżynierowie zajmujący się systemami wbudowanymi stają przed kluczowymi kompromisami przy wyborze interfejsów do integracji kamer na poziomie płytki. Interfejs USB 3.1 zapewnia wysoką przepustowość (5 Gb/s), co czyni go odpowiednim do transmisji wideo w jakości HD – jednak jego narzut protokołu powoduje opóźnienie wynoszące 5–10 ms, ograniczając jego przydatność w pętlach sterowania w czasie rzeczywistym. MIPI CSI-2 oferuje skalowalną przepustowość (do 6 Gb/s na linię) oraz synchronizację wyzwalaną sprzętowo, umożliwiając opóźnienie poniżej jednego milisekundy i precyzyjne zsynchronizowanie wielu czujników – co czyni go idealnym rozwiązaniem dla zastosowań w automatyce przemysłowej i robotyce. LVDS zapewnia deterministyczną transmisję o bardzo niskim opóźnieniu (<1 ms) za pomocą prostych protokołów szeregowych, choć przepustowość na pojedynczą linię jest ograniczona do ok. 655 Mb/s, co ogranicza jego zastosowanie do strumieni o niższej rozdzielczości lub skompresowanych. Systemy wizyjne wymagające ścisłej synchronizacji między kamerami powinny preferować MIPI CSI-2; natomiast zastosowania krytyczne pod względem bezpieczeństwa, takie jak percepcja w pojazdach autonomicznych, korzystają z przewidywalności czasowej zapewnianej przez LVDS. USB 3.1 pozostaje rozwiązaniem uzasadnionym kosztowo w przypadku monitoringu HD nie wymagającego działania w czasie rzeczywistym, gdzie niewielkie opóźnienie jest akceptowalne – pod warunkiem, że zweryfikowano ograniczenia termiczne i obciążenie procesora.
Najlepsze praktyki w zakresie integralności sygnału i układania płytek PCB przez Interface
Integralność sygnału jest specyficzna dla danego interfejsu i stanowi podstawę niezawodnej pracy kamery na poziomie płytki. W przypadku USB 3.1 należy utrzymać impedancję różnicową na poziomie 90 Ω, zastosować pary przewodów o jednakowej długości (±5 mil), trasować je w ekranie masy oraz wyraźnie oddzielić od zakłócających ścieżek cyfrowych w celu ograniczenia zakłóceń elektromagnetycznych (EMI). Dla MIPI CSI-2 wymagana jest impedancja 100 Ω na każdą różnicową linię transmisji, dopasowanie długości ścieżek z dokładnością do ±10 mil oraz unikanie przejść przez otwory (vias) w pobliżu odbiorników — szczególnie istotne dla szybkich linii pracujących powyżej 1,5 Gbps. Układy LVDS wymagają krótkich ścieżek (mniej niż 10 cali), stałej impedancji 100 Ω oraz ścieżek ochronnych (guard traces) w celu ograniczenia zakłóceń wzajemnych (crosstalk). We wszystkich interfejsach należy podzielić płaszczyzny masy w celu izolacji obwodów analogowych czujnika od domen cyfrowych procesora obrazu (ISP) i procesora głównego, umieścić kondensatory filtrujące w odległości nie większej niż 2 mm od pinów zasilania oraz stosować wielowarstwowe płytki (co najmniej 4 warstwy) z ciągłymi płaszczyznami odniesienia. Nieprawidłowa trasówka odpowiada za 32 % artefaktów obrazowych w prototypowych systemach widzenia — dlatego symulacje po wykonaniu trasówki oraz walidacja impedancji są obowiązkowe w projektach krytycznych dla misji.
Integracja mechaniczna: montaż obiektywu i elastyczność optyczna
Dokładne montowanie obiektywów jest kluczowe: niedoskonałości wyrównania w skali mikronów powodują przesunięcie ostrości, zniekształcenia lub utratę rozdzielczości. Inżynierowie muszą znaleźć kompromis między sztywnością mechaniczną — niezbędną do odporności na wstrząsy i drgania — a możliwością regulacji w terenie, którą osiąga się zwykle za pomocą gwintowanych tub lub podkładów (shimów). Elastyczność optyczna wymaga kompatybilności z różnymi typami obiektywów (stałofokalnych, zmiennoogniskowych, cieczowych) oraz obsługi strojenia długości ogniskowej za pomocą mechanizmów helikalnych lub sterowników z napędem silnikowym. Różnice w współczynnikach rozszerzalności cieplnej pomiędzy obiektywami a czujnikami wymagają zastosowania środków zapobiegawczych — np. materiałów o niskim współczynniku rozszerzalności cieplnej (CTE), takich jak inwar czy kompozyty ceramiczne, albo kinematycznych układów mocujących — szczególnie w środowiskach przemysłowych (-40 °C do +85 °C). W przypadku obrazowania w podczerwieni lub wielospektralnego przezroczystość materiału podłoża w docelowej zakresie fal (np. german dla długiej podczerwieni LWIR, kwarc syntetyczny dla ultrafioletu UV) staje się podstawowym ograniczeniem projektowym. Modułowe interfejsy obiektywów umożliwiają szybkie wymienianie bez konieczności pełnej ponownej kalibracji, jednak tolerancje odległości flanszowej muszą pozostawać poniżej 10 µm, aby uniknąć zacienienia (vignetting) lub degradacji funkcji przejściowej modulacji (MTF).

Zapewnienie odporności na poziomie systemu w projektach kamer na poziomie płytki
Zmniejszanie zakłóceń elektromagnetycznych (EMI) oraz podział płaszczyzny uziemienia w celu zapewnienia współistnienia czujnika i procesora obrazu (ISP)
Projekty niezakrytych kamer na poziomie płytki PCB nie posiadają ekranowania przed zakłóceniami elektromagnetycznymi (EMI), jakie zapewniają zamknięte moduły, co zwiększa odpowiedzialność za izolację na poziomie płytki PCB pomiędzy czujnikami obrazu a procesorami sygnałów obrazu (ISP). Oddzielne płaszczyzny masy – oddzielające analogowe obszary czujników od cyfrowych podsystemów ISP – są niezbędne do minimalizacji sprzężenia zakłóceń przewodzonych, ponieważ zakłócenia mieszane mogą wprowadzać harmoniczne sygnału zegarowego o poziomie przekraczającym 50 dBμV/m (norma IEC 61000-4-3). Skutecznymi metodami są: uziemienie w punkcie gwiazdy przy wejściu zasilania, ścieżki ochronne z mostkami przejściowymi wokół szybkich sieci cyfrowych, unikanie otworów termicznych w powierzchniach masy w pobliżu czujników oraz stosowanie cewek ferrytowych na liniach zegara szeregowego interfejsu I²C. Integralność sygnału szybko się pogarsza, gdy odległość między czujnikiem a ISP spadnie poniżej 3λ najwyższej częstotliwości roboczej – co wymaga trasowania z kontrolowaną impedancją oraz różnicowych par przewodów o dopasowanej długości. Wczesne prototypowanie z wykorzystaniem sond bliskiego pola EMI (odstęp 5 mm) pozwala zidentyfikować obszary zagrożenia; lokalne ekranowanie czujników materiałem mu-metalowym zmniejsza emisję promieniowaną o 12–18 dB (dokument FCC OET-65). Zachowanie odstępu ≥40 mil pomiędzy domenami sygnałów mieszanych systematycznie poprawia stosunek sygnału do szumu (SNR) o 20% w module wysokiej rozdzielczości.
Integracja oprogramowania i przenośność SDK dla kamer na poziomie płyty
Wsparcie sterowników wieloplatformowych: Linux RT, QNX oraz bare-metal RTOS z Spinnaker
Przenośność oprogramowania między platformami jest nieodzowna w przypadku wdrożeń wizji wbudowanej obejmujących systemy operacyjne Linux Real-Time (RT), QNX oraz zasobowo ograniczone środowiska bare-metal RTOS. Każdy system operacyjny stawia inne wymagania dotyczące czasu odpowiedzi, pamięci i modelu sterowników — jednak konieczne jest zachowanie spójnej, pikselowo dokładnej akwizycji obrazu oraz synchronizacji wyzwalanej sprzętowo. Jednolity warstwa abstrakcji SDK likwiduje tę lukę: na przykład zestaw SDK Spinnaker oferuje ustandaryzowane interfejsy API na platformach x86, ARM i RISC-V, jednocześnie zapewniając natywną obsługę rzeczywistego czasu przechwytywania klatek, wyzwalania sprzętowego oraz dostępu do rejestrów procesora obrazu (ISP). Dzięki temu eliminuje się konieczność powtarzania prac związanych z opracowywaniem sterowników przy migracji z przemysłowych komputerów PC działających pod kontrolą Linux RT na cele oparte na mikrokontrolerach z systemem RTOS. Zespoły wykorzystujące takie frameworki skracają czas integracji nawet o 40%, zachowując przy tym zachowanie deterministyczne — nawet w warunkach obniżenia wydajności spowodowanego nagrzewaniem lub skalowaniem napięcia.
Gotowi Państwo zoptymalizować integrację kamer poziomu płytki do produkcji OEM?
Bez szwów integracja kamer poziomu płytki jest fundamentem niezawodnych, wydajnych systemów wizyjnych wbudowanych — żaden zaawansowany algorytm ani sprzęt przetwarzania nie potrafi zrekompensować błędów w doborze interfejsu, niedoskonałości integralności sygnału ani niezoptymalizowanego projektu mechanicznego. Stosując sprawdzone w praktyce najlepsze praktyki integracji oraz współpracując z dostawcą kamer oferującym wstępnie zweryfikowane sprzęty, wsparcie w zakresie projektów odniesienia oraz wieloplatformowe narzędzia oprogramowania, zmniejszysz liczbę iteracji projektowych, skrócisz czas wprowadzania produktu na rynek oraz uzyskasz spójną i opłacalną wydajność w masowej produkcji OEM.
Aby uzyskać rozwiązania przemysłowe w zakresie kamer na poziomie płytki dostosowane do aplikacji wizji wbudowanej lub uzyskać dostęp do kompletnych pakietów projektów odniesienia, wsparcia inżynieryjnego wewnętrznej firmy oraz usług niestandardowej produkcji OEM (jakie oferuje HIFLY), należy współpracować z dostawcą posiadającym bogate doświadczenie w dziedzinie przemysłowej wizji maszynowej. 15-letnie doświadczenie HIFLY obejmuje projektowanie kamer na poziomie płytki, pełną niestandardową realizację zamówień OEM/ODM oraz kompleksową integrację systemów wizji wbudowanej — wszystko wsparte certyfikatem ISO 9001:2015, wsparciem w zakresie zgodności z międzynarodowymi przepisami prawno-regulacyjnymi oraz dedykowanymi usługami inżynieryjnymi wspierającymi proces wdrażania rozwiązań. Skontaktuj się z nami już dziś, aby umówić się na bezpłatną konsultację, zamówić prototyp niestandardowy lub zoptymalizować swój proces integracji kamer na poziomie płytki.





