

-
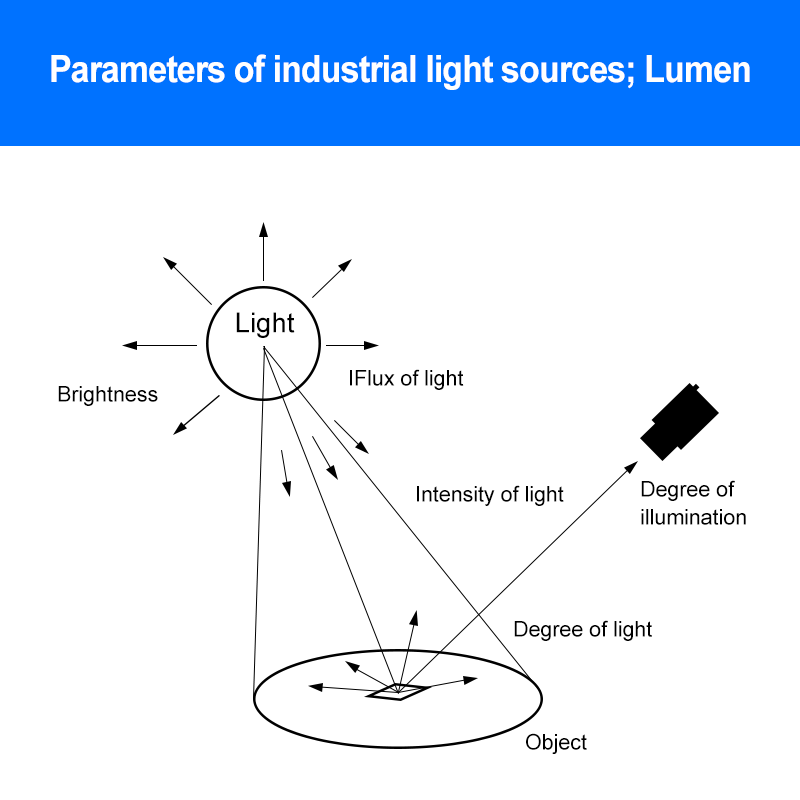
Parametrar för industriella ljuskällor; Lumen
2025/10/22I industriella ljuskällor är lumen (symbol: lm) den enhet som används för att mäta en ljuskällas totala ljusflöde. Den representerar summan av synlig ljusenergi som utstrålas av ljuskällan i alla riktningar och återspeglar direkt den totala ljus...
-
Hur upprätthåller optiska prismor precisionen i industriell inspektion?
2025/10/20I industriella maskinsynssystem är kameran "ögat", algoritmen är "hjärnan" och det optiska prismat är den dolda "kommandanten för ljusvägen"—osynlig och intaglig, men ändå kapabel att exakt möjliggöra att "ögat" fångar mål...
-
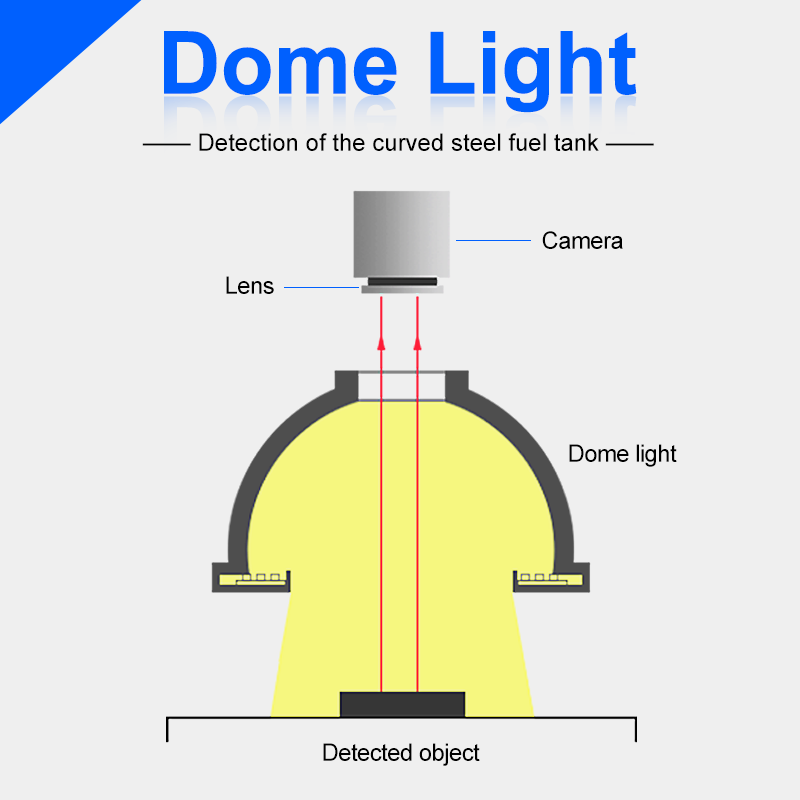
Utöver det nakna ögat: Automatiserad inspektion för felfria böjda ståltankar
2025/10/18Innan en lager med färg förvandlar ett rått stålskal till en polerad komponent måste metalsytan vara perfekt. För tillverkare av komponenter som omlackade stålkraftstanks är närvaron av ens en liten repa, en liten buckla eller oönskad sandpappersåterstod...
-
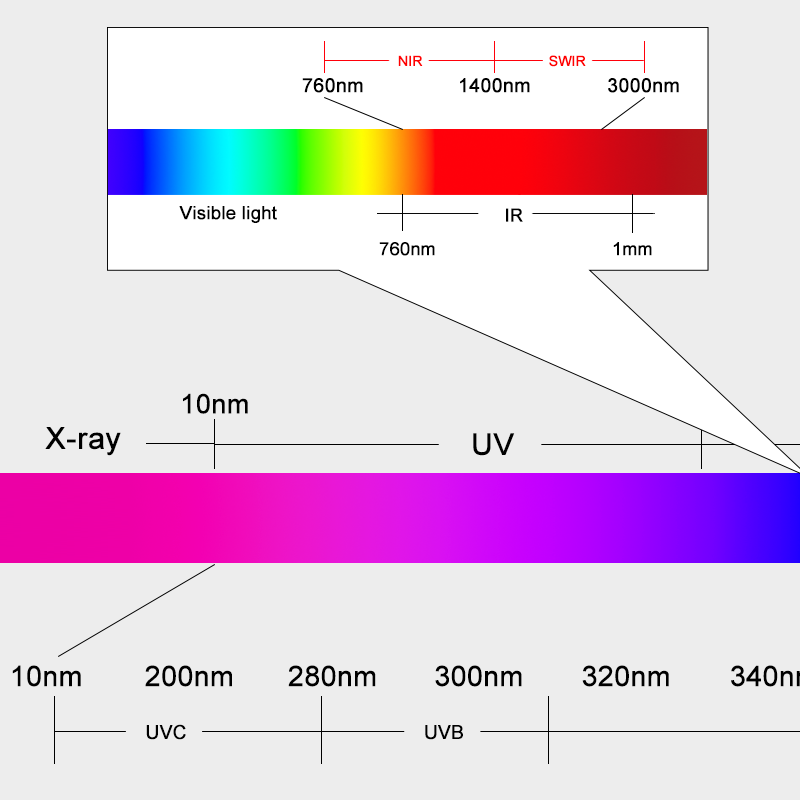
Tillämpningar av ultraviolett och infrarött ljus i belysning för maskinseende
2025/10/16System för maskinseende är viktiga inom modern industriell automatisering, kvalitetsinspektion och forskning, där belysning utgör en central komponent. Även om synligt ljus är vanligt, erbjuder ultraviolett (UV) ljus och infrarött (IR) ljus unika fördelar ...
-
Industriella koaxiala ljuskällor: tillämpningsområden och funktionsprincip
2025/10/14Industriella koaxiala ljuskällor används främst i industriella scenarier där det krävs att eliminera ytspeglar från objekt, framhäva fina strukturer eller uppnå högprestanda detektering, och är särskilt lämpliga för detektering ...
-

Industrikamera "Fångstlägen": Trigger, synkronisering och kontinuerlig
2025/10/11På produktionslinjer för industriell automatisering ser man ofta maskiner som klickar iväg bilder – det är industriella kameror i arbete. Till skillnad från informell smartphonefotografering betonar dessa kameror tidtagning, rytm och till och med "sömlös samverkan..."
-

Mikrofel, makro-risk: Den osynliga hoten från dammpartiklar i ampuller och flaskor
2025/10/08Inom läkemedels- och bioteknikbranschen kan den minsta defekten få stora konsekvenser. När en patient får en injektion förväntar de sig ett sterilt, perfekt produkt. Men inom det sterila miljön i en sluten flaska eller ampull råder en konstant...
-
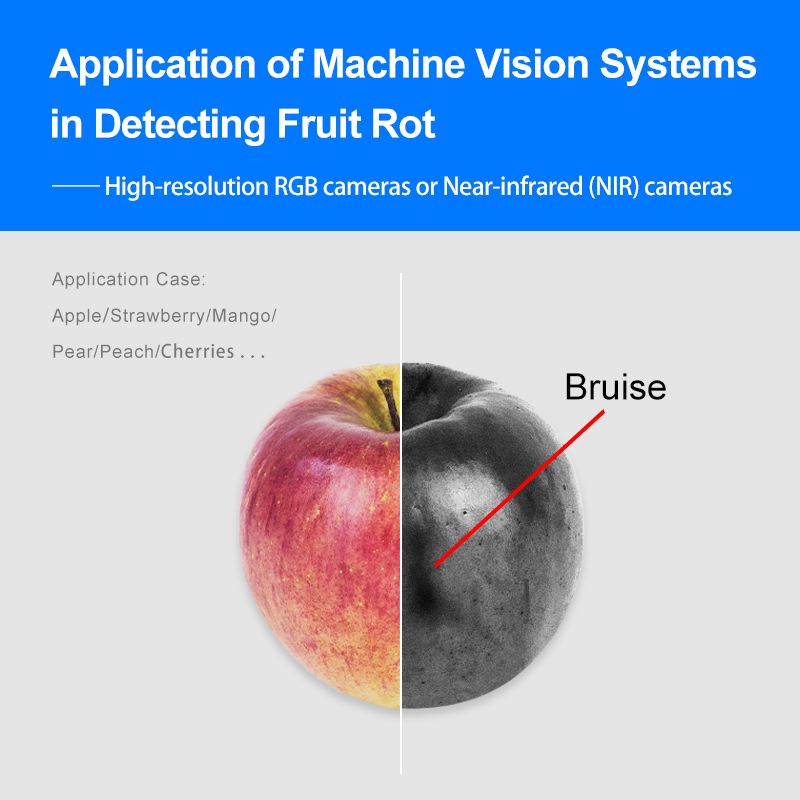
Tillämpning av maskinseendesystem för att upptäcka fruktruttna
2025/10/05I den globala fruktleden är förluster efter skörd på grund av ruttna fortfarande en avgörande utmaning, där statistik visar att upp till 25 % av färsk frukt kasseras årligen på grund av odetekterad förruttnelse under sortering och lagring. Traditionella metoder för upptäckt av fruktruttna, som bygger på manuell inspektion, är inte bara arbetsintensiva och tidskrävande utan också benägna för mänskliga fel – särskilt när det gäller stora volymer av produkter eller tidiga stadier av ruttna som är svåra att se med blotta ögat.
-
Vit, blå, röd och grön belysning i maskinseende
2025/10/02I system för maskinseende väljs färgen på belysningen inte godtyckligt – att välja rätt kan få defekter att tydligt framträda, medan fel val kan göra att även de mest avancerade algoritmerna har svårt att känna igen egenskaper. Många människor...
-
Från mänskligt fel till AI-precision: Hur maskinsyn revolutionerar kvalitetskontroll av kretskort
2025/09/29I den snabba världen av elektronikproduktion är det tryckta kretskortet (PCB) den osjungna hjälten, den "moder till alla elektroniska produkter". Från smartphones till servrar är varje enhet beroende av dessa komplexa kretskort. Men med efterfrågan...
-
Maskinseende: Kärnanvändningar som formar modern golf
2025/09/27Golf, en sport definierad av precision, har länge förlitat sig på mänsklig bedömning – från att uppskatta puttdistanser till att döma om bollens placering. Idag har maskinseendeteknologi – en gren inom AI som gör det möjligt för datorer att fånga, analysera och tolka visuell data – blivit en spelväxlare.
-
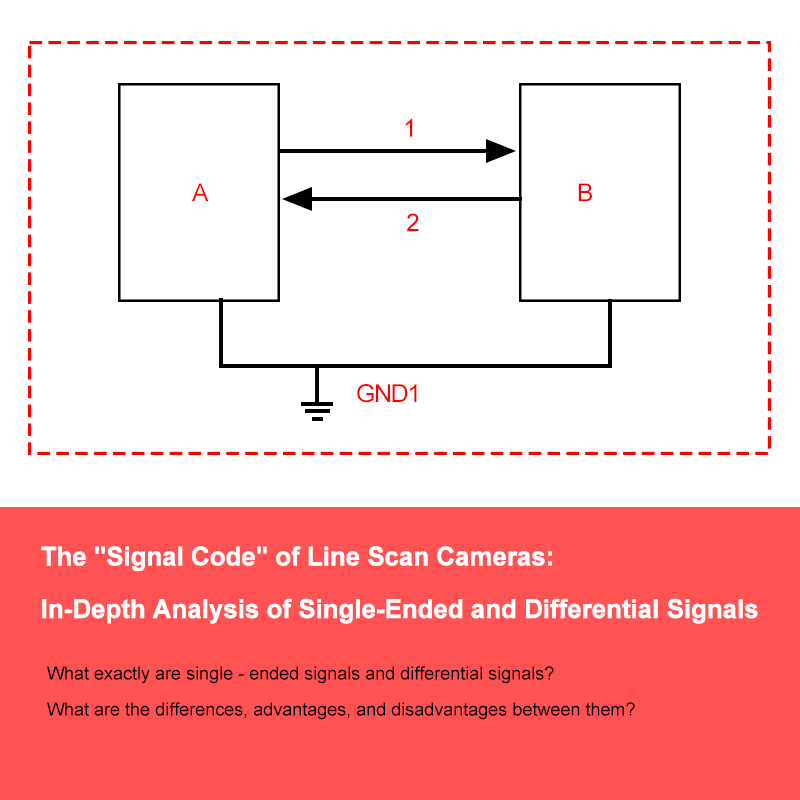
Signalkoden för linjescanningskameror: Djupgående analys av ensidiga och differentiella signaler
2025/09/25Inom maskinvision området fungerar linjescanningskameror som "clairvoyant ögon", och har den viktiga uppgiften att utföra högprecisionsdetektering och identifiering av olika objekt. Inuti kameran är utlöstningsanslutningsmetoderna för encodern, es...





