

-
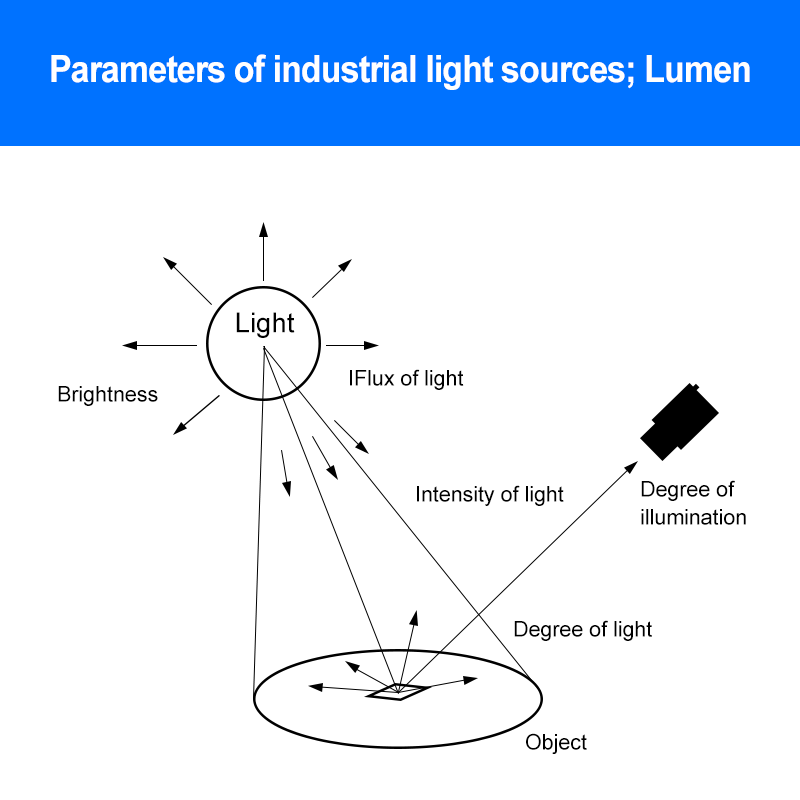
พารามิเตอร์ของแหล่งกำเนิดแสงอุตสาหกรรม; ลูเมน
2025/10/22ในแหล่งกำเนิดแสงอุตสาหกรรม ลูเมน (สัญลักษณ์: lm) เป็นหน่วยที่ใช้วัดค่าฟลักซ์ส่องสว่างรวมของแหล่งกำเนิดแสง มันแสดงถึงผลรวมของพลังงานแสงที่มองเห็นได้ที่ปล่อยออกมาจากแหล่งกำเนิดแสงในทุกทิศทาง และสะท้อนโดยตรงถึงความสว่างโดยรวมของแหล่งกำเนิดแสง
-
ปริซึมออปติคัลช่วยรักษาความแม่นยำในการตรวจสอบอุตสาหกรรมได้อย่างไร
2025/10/20ในระบบการมองเห็นด้วยเครื่องจักรอุตสาหกรรม กล้องคือ "ตา" อัลกอริทึมคือ "สมอง" และปริซึมแสงคือ "ผู้บัญชาการเส้นทางแสง" ที่มองไม่เห็นแต่มีบทบาทสำคัญ สามารถควบคุมให้ "ตา" จับภาพเป้าหมายได้อย่างแม่นยำ
-
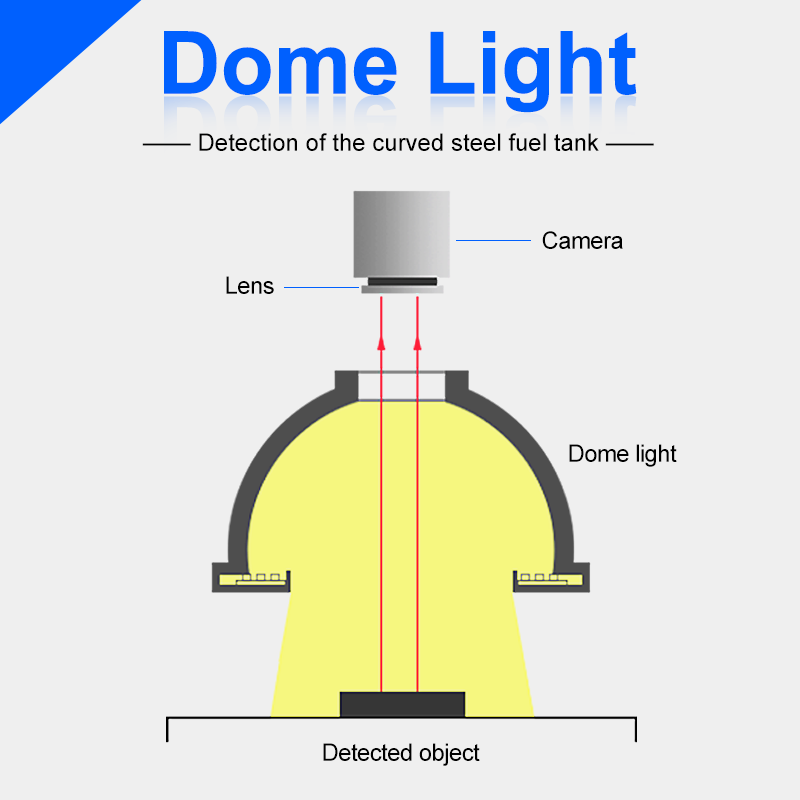
เหนือกว่าการมองเห็นด้วยตาเปล่า: การตรวจสอบอัตโนมัติเพื่อถังน้ำมันเหล็กโค้งที่ไร้ข้อบกพร่อง
2025/10/18ก่อนที่ชั้นสีจะเปลี่ยนเปลือกเหล็กดิบให้กลายเป็นชิ้นส่วนที่มีพื้นผิวเรียบเงา ผิวโลหะจะต้องสมบูรณ์แบบ สำหรับผู้ผลิตชิ้นส่วน เช่น ถังเชื้อเพลิงเหล็กที่ยังไม่ได้ทาสี การมีรอยขีดข่วนเล็กน้อย รอยบุ๋มขนาดเล็ก หรือเศษกระดาษทรายหลงเหลืออยู่ ล้วนถือเป็นปัญหา
-
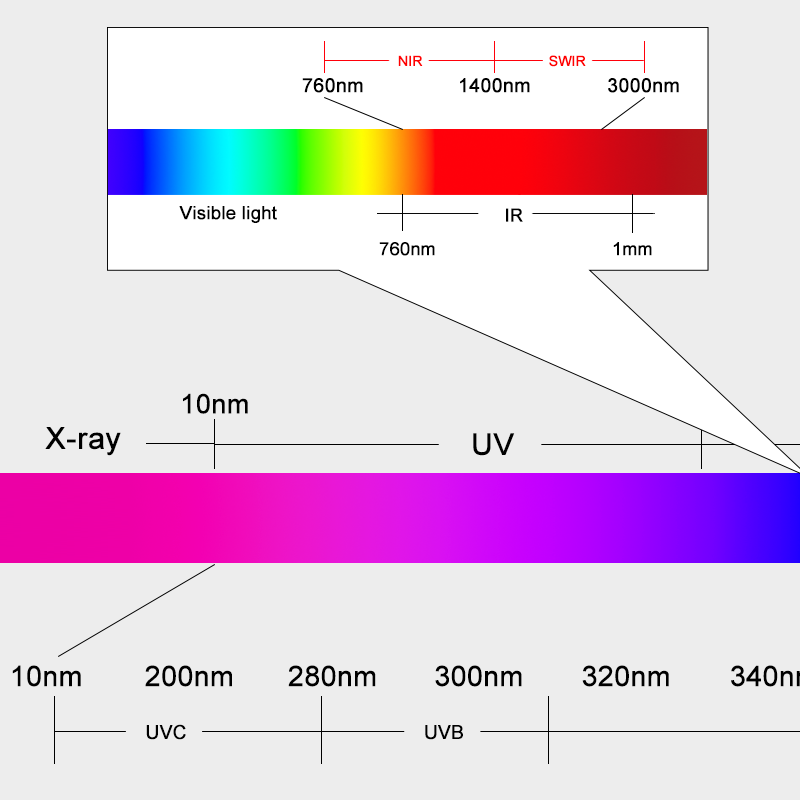
การประยุกต์ใช้แสงอัลตราไวโอเลตและแสงอินฟราเรดในระบบให้แสงสำหรับภาพจักรกล
2025/10/16ระบบภาพจักรกลมีความสำคัญอย่างยิ่งในงานอัตโนมัติทางอุตสาหกรรม การตรวจสอบคุณภาพ และงานวิจัย โดยการให้แสงถือเป็นองค์ประกอบหลัก แม้ว่าแสงที่มองเห็นได้มักจะถูกใช้งานทั่วไป แต่แสงอัลตราไวโอเลต (UV) และแสงอินฟราเรด (IR) ให้ข้อได้เปรียบที่โดดเด่น...
-
แหล่งกำเนิดแสงโคแอกเซียลสำหรับอุตสาหกรรม: สาขาการประยุกต์ใช้และหลักการทำงาน
2025/10/14แหล่งกำเนิดแสงโคแอกเซียลสำหรับอุตสาหกรรมมีการประยุกต์ใช้หลักในสถานการณ์อุตสาหกรรมที่ต้องการลดการสะท้อนของพื้นผิววัตถุ เน้นโครงสร้างละเอียด หรือต้องการการตรวจจับความแม่นยำสูง และเหมาะอย่างยิ่งสำหรับการตรวจสอบ...
-

โหมดการจับภาพของกล้องอุตสาหกรรม: การทริกเกอร์ การซิงโครไนซ์ และการถ่ายต่อเนื่อง
2025/10/11บนสายการผลิตที่ใช้ระบบอัตโนมัติในอุตสาหกรรม มักจะเห็นเครื่องจักรทำงานอย่างต่อเนื่องโดยการถ่ายภาพซ้ำๆ นั่นคือการทำงานของกล้องอุตสาหกรรม ซึ่งแตกต่างจากการถ่ายภาพด้วยสมาร์ทโฟนทั่วไป กล้องเหล่านี้ให้ความสำคัญกับจังหวะเวลา และแม้แต่ "การทำงานร่วมกันอย่างไร้รอยต่อ..."
-

ข้อบกพร่องเล็กน้อย แต่เสี่ยงรุนแรง: ภัยคุกคามที่มองไม่เห็นจากอนุภาคฝุ่นในหลอดหยดยาและขวดบรรจุยา
2025/10/08ในอุตสาหกรรมเภสัชกรรมและเทคโนโลยีชีวภาพ ข้อผิดพลาดเพียงเล็กน้อยอาจส่งผลกระทบอย่างใหญ่หลวง เมื่อผู้ป่วยได้รับการฉีดยา พวกเขาคาดหวังผลิตภัณฑ์ที่ปลอดเชื้อและสมบูรณ์แบบ แต่ภายในสภาพแวดล้อมปลอดเชื้อของขวดบรรจุยาหรือหลอดหยดยาที่ปิดสนิท ยังคงมี...
-
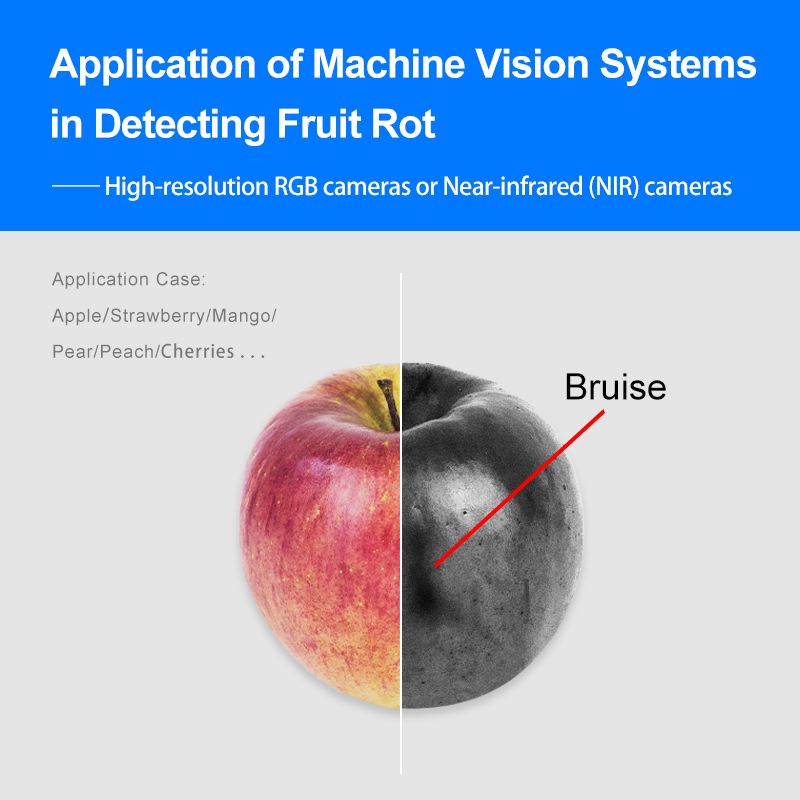
การประยุกต์ใช้ระบบปัญญาประดิษฐ์เพื่อการตรวจสอบภาพในการตรวจจับผลไม้เน่า
2025/10/05ในห่วงโซ่อุปทานผลไม้ระดับโลก การสูญเสียหลังการเก็บเกี่ยวอันเนื่องมาจากการเน่าเป็นปัญหาสำคัญ โดยข้อมูลทางสถิติระบุว่ามีผลไม้สดถึง 25% ที่ถูกทิ้งทุกปีเนื่องจากไม่สามารถตรวจพบความเน่าเสียระหว่างกระบวนการคัดแยกและจัดเก็บได้
-
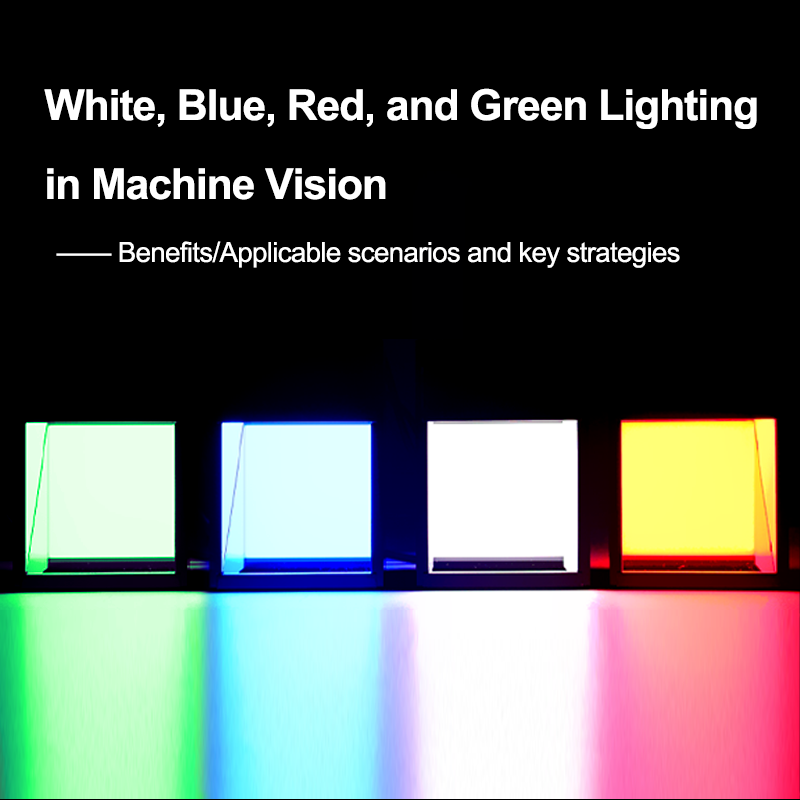
แสงสีขาว สีน้ำเงิน สีแดง และสีเขียวในการตรวจสอบด้วยภาพจักรกล
2025/10/02ในระบบการตรวจสอบด้วยภาพจักรกล การเลือกสีของแสงไม่ได้ทำอย่างสุ่ม—การเลือกแสงที่เหมาะสมสามารถทำให้ตำหนิหรือความผิดปกติปรากฏชัดเจน ในขณะที่การเลือกแสงที่ไม่เหมาะสมอาจทำให้อัลกอริธึมขั้นสูงที่สุดก็ยังพบกับความยากลำบากในการตรวจจับลักษณะต่างๆ หลายคน...
-
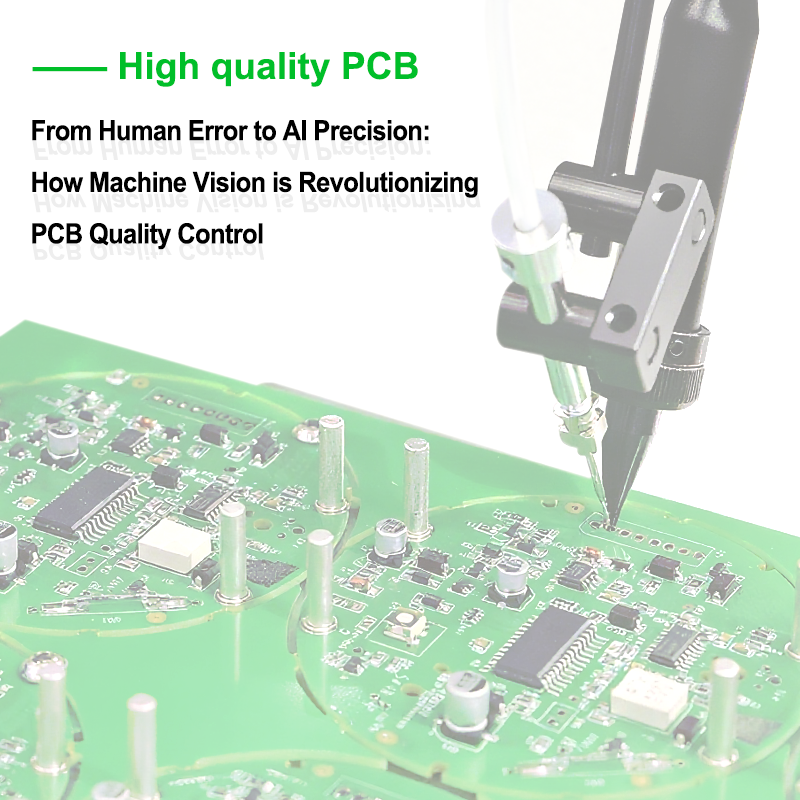
จากข้อผิดพลาดของมนุษย์สู่ความแม่นยำด้วยปัญญาประดิษฐ์: เทคโนโลยี Machine Vision ปฏิวัติการควบคุมคุณภาพแผงวงจรพีซีบีอย่างไร
2025/09/29ในโลกของการผลิตอิเล็กทรอนิกส์ที่เต็มไปด้วยความเร่งรีบ แผงวงจรพิมพ์ (PCB) คือฮีโร่ที่ไม่ได้รับการยกย่อง หรือที่เรียกว่า "มารดาของผลิตภัณฑ์อิเล็กทรอนิกส์ทุกชนิด" ตั้งแต่สมาร์ทโฟนไปจนถึงเซิร์ฟเวอร์ อุปกรณ์ทุกชิ้นล้วนอาศัยแผงวงจรที่ซับซ้อนเหล่านี้ แต่เมื่อความต้องการผลิตภัณฑ์ที่ไร้ที่ติสูงที่สุดเท่าที่เคยมีมา ผู้ผลิตจะสามารถรับประกันคุณภาพในระดับใหญ่ได้อย่างไร
-
วิชันแมชชีน: การประยุกต์ใช้งานหลักที่กำลังเปลี่ยนวงการกอล์ฟสมัยใหม่
2025/09/27กอล์ฟ ซึ่งเป็นกีฬาที่เน้นความแม่นยำ มักพึ่งพาการตัดสินของมนุษย์มาโดยตลอด ไม่ว่าจะเป็นการประเมินระยะทางในการตีพัตต์ หรือการตัดสินตำแหน่งของลูกบอล ปัจจุบัน เทคโนโลยีวิชันแมชชีน ซึ่งเป็นสาขาหนึ่งของปัญญาประดิษฐ์ที่ทำให้คอมพิวเตอร์สามารถจับภาพ วิเคราะห์ และตีความข้อมูลภาพได้ ได้กลายเป็นตัวเปลี่ยนเกมไปแล้ว
-
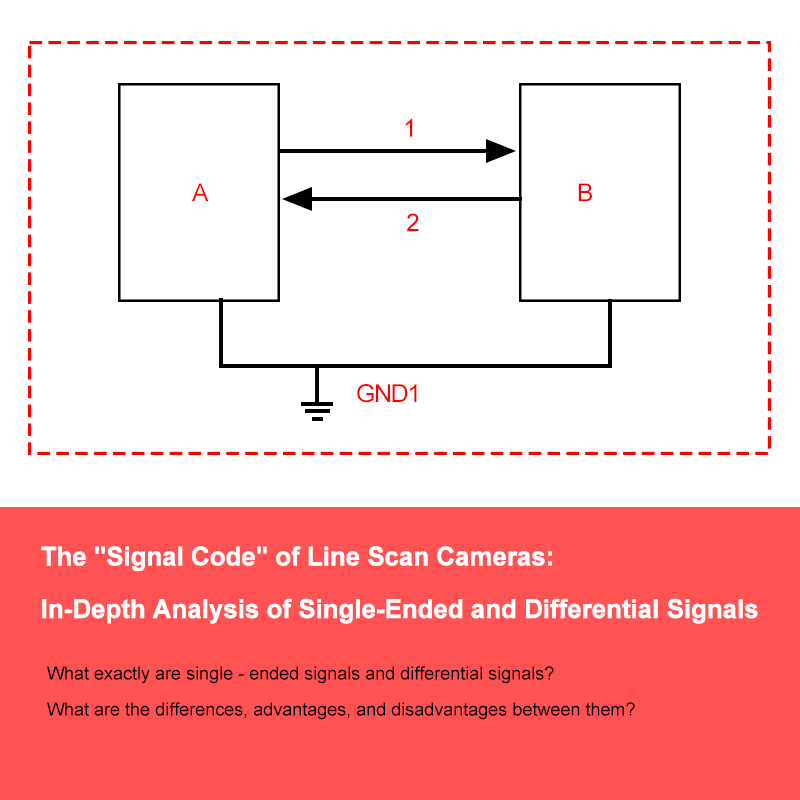
รหัส "Signal Code" ของกล้อง Line Scan: การวิเคราะห์อย่างลึกซึ้งเกี่ยวกับสัญญาณแบบ Single-Ended และ Differential
2025/09/25ในด้านการมองเห็นของเครื่อง (machine vision) กล้อง line scan ทำหน้าที่เหมือน "ดวงตาที่มองทะลุทุกสิ่ง" รับผิดชอบงานตรวจจับและระบุวัตถุต่าง ๆ ด้วยความแม่นยำสูง โดยภายในกล้อง จะมีวิธีการเชื่อมต่อการกระตุ้นของเอนคอดเดอร์...





